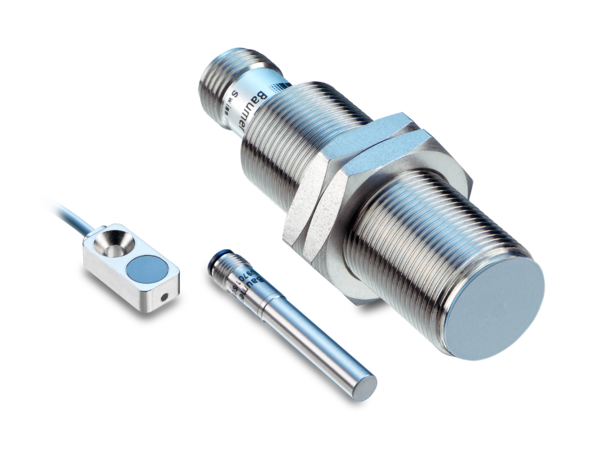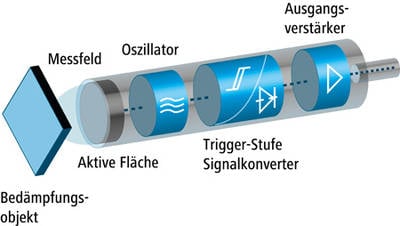
Induktive Sensoren arbeiten berührungslos. Sie detektieren Metallobjekte, die sich in ihr Messfeld bewegen.
Der Oszillator erzeugt mittels Schwingkreis ein elektromagnetisches Wechselfeld, das aus der aktiven Fläche des Sensors austritt. In jedem sich frontseitig nähernden Metallobjekt werden Wirbelströme induziert, welche dem Oszillator Energie entziehen. Dadurch resultiert am Oszillatorausgang eine Pegeländerung, die bei digitalen Sensoren über einen Schmitt-Trigger die Ausgangsstufe schaltet, oder bei messenden Sensoren in Abhängigkeit der Objektdistanz das analoge Ausgangssignal beeinflusst.
Zu unseren induktiven Näherungsschaltern
Schaltverhalten von induktiven Näherungsschaltern
Schaltabstand
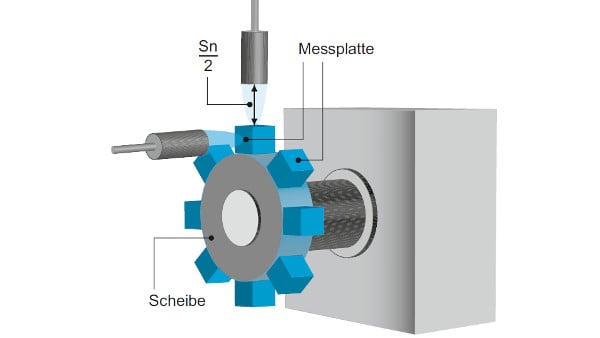
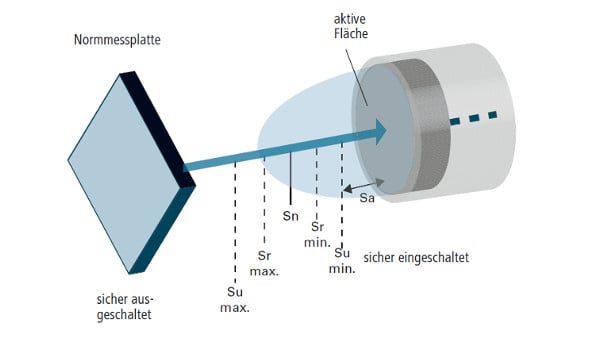
Die internationale Norm EN 60947-5-2 definiert den Schaltabstand wie folgt: Schaltabstand ist der Abstand, bei dem sich eine auf die aktive Fläche des Näherungsschalters zubewegende Normmessplatte einen Signalwechsel bewirkt.
Normmessplatte
Sie ist quadratisch, 1 mm dick und aus Fe 360 (ST 37). Die Seitenlänge entspricht entweder dem Durchmesser der aktiven Sensorfläche oder dem dreifachen Nenn-Schaltabstand Sn, wobei der jeweils grössere Wert massgebend ist.
Nennschaltabstand Sn
Der Nennschaltabstand Sn ist eine Typenklassifizierungsgrösse und berücksichtigt weder Fertigungstoleranzen noch Änderungen durch äussere Bedingungen wie Spannung und Temperatur.
Realschaltabstand Sr
Effektiver Schaltabstand eines einzelnen Näherungsschalters, der bei festgelegter Temperatur, Spannung und Einbaubedingungen gemessen wird. Bei induktiven Näherungsschaltern muss er bei 23 ±5 °C zwischen 90% und 110% des Nennschaltabstands liegen.
Nutzschaltabstand Su
Schaltabstand eines einzelnen Näherungsschalters, gemessen über den Arbeitstemperaturbereich und bei einer Versorgungsspannung von 90% und 110% des Bemessungswertes.
Gesicherter Schaltabstand Sa
Abstand von der aktiven Fläche, in dem die Betätigung des Näherungsschalters unter festgelegten Bedingungen sichergestellt ist. Bei induktiven Näherungsschaltern liegt der gesicherte Schaltabstand zwischen 0% und 81% des Nennschaltabstands.
Erhöhter Schaltabstand – GammaProx
Die Schaltabstände der GammaProx-Sensoren betragen bis zum fünffachen des CENELEC-Normwertes. Damit lassen sich Stähle und Buntmetalle gleichermassen sicher und zuverlässig detektieren. Der erhöhte Schaltabstand erlaubt es, die Distanz zu bewegten Objekten generell höher zu wählen, was grössere Montagetoleranzen zulässt, mechanischen Beschädigungen vorbeugt und dadurch die Zuverlässigkeit von Anlagen erhöht.
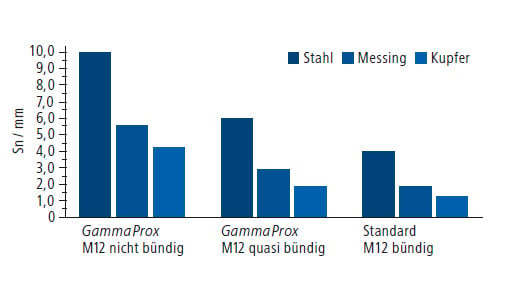
GammaProx-Sensoren reagieren aufgrund des erhöhten Schaltabstands sensitiver auf umgebendes Material. Aus diesem Grund ist ein frontbündiger Einbau nicht in alle Materialien möglich. Die genauen Einbaubedingungen und Korrekturfaktoren sind in den Datenblättern spezifiziert.
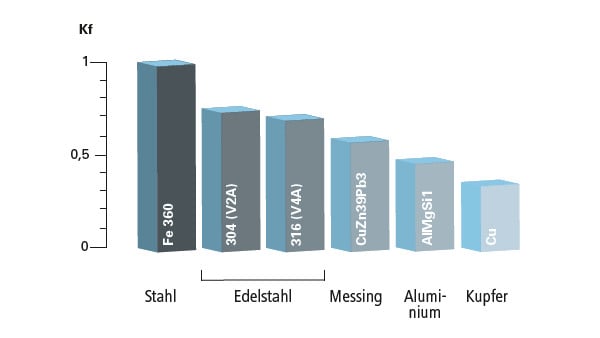
Korrekturfaktor Kf
Werden zur Bedämpfung andere metallische Werkstoffe eingesetzt als derjenige der Norm-Messplatte (Fe 360), so müssen die angegebenen Schaltabstände mit dem im Datenblatt angegebenen Materialkorrekturfaktor multipliziert werden. Diese Resultate sind als Richtwerte zu betrachten. Sind im Datenblatt keine Korrekturfaktoren spezifiziert, können die hier angegebenen Standardwerte verwendet werden. Von der Normmessplatte abweichende Geometrien des Messobjekts haben ebenfalls einen Einfluss auf den Schaltabstand.
Beim Detektieren von Aluminiumfolien oder metallbeschichteten Materialien kann ein Schaltabstand wie bei Stahl erreicht werden. Der Nenn-Schaltabstand Sn hängt von der Zusammensetzung und der Dicke der Schichten ab.
Faktor 1
Bei Standardsensoren verringert sich der Schaltabstand für nicht ferromagnetische Metalle um bis zu 70%. Faktor 1-Sensoren beinhalten einen Mikrocontroller, welcher diesen Einfluss kompensiert. Dadurch weisen Faktor 1-Sensoren keinen materialabhängigen Reduktionsfaktor auf, verfügen über eine vernachlässigbare Temperaturdrift und zeichnen sich zudem durch eine hohe Schaltgeschwindigkeit aus. Sie eignen sich somit insbesondere für Messungen auf Aluminium oder Buntmetalle sowie für Drehzahlmessungen auf ein Zahnrad oder eine Lochscheibe.
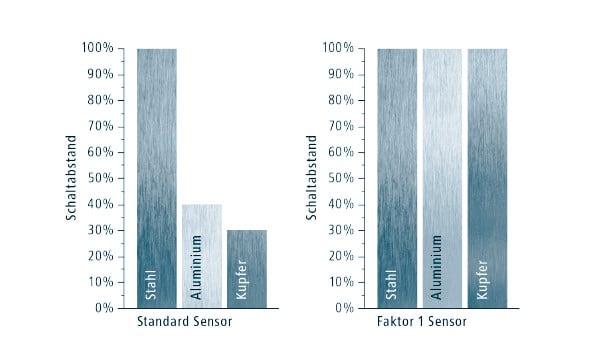
Dieser gleichbleibende Abstand erhöht die Flexibilität bei der Konstruktion einer Anlage und der Installation der Sensoren enorm. Doch die Vorteile der Baumer Sensoren reichen darüber hinaus: So sind sie im Verhältnis Schaltabstand zur Geschwindigkeit die schnellsten in ihrer jeweiligen Klasse und verfügen über aussergewöhnlich hohe Schaltreserven.
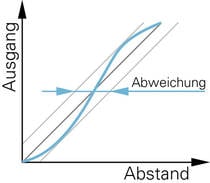
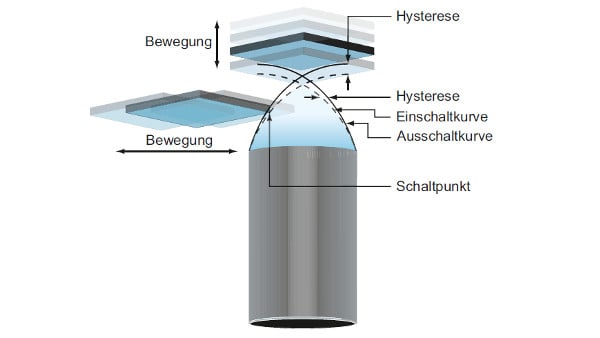
Schalthysterese
Die Hysterese ist die Differenz zwischen Einschalt und Ausschaltpunkt bei Annäherung und Entfernung der Messplatte vom Initiator. Die eingebaute Hysterese beugt Fehlschaltungen bei mechanischen Vibrationen vor.
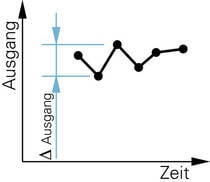
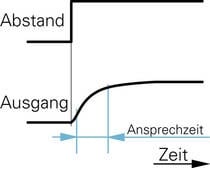
Schaltfrequenz
Die nach der Messmethode EN 60947-5-2 ermittelte Schaltfrequenz ist die maximal mögliche Anzahl Schaltvorgänge je Sekunde.