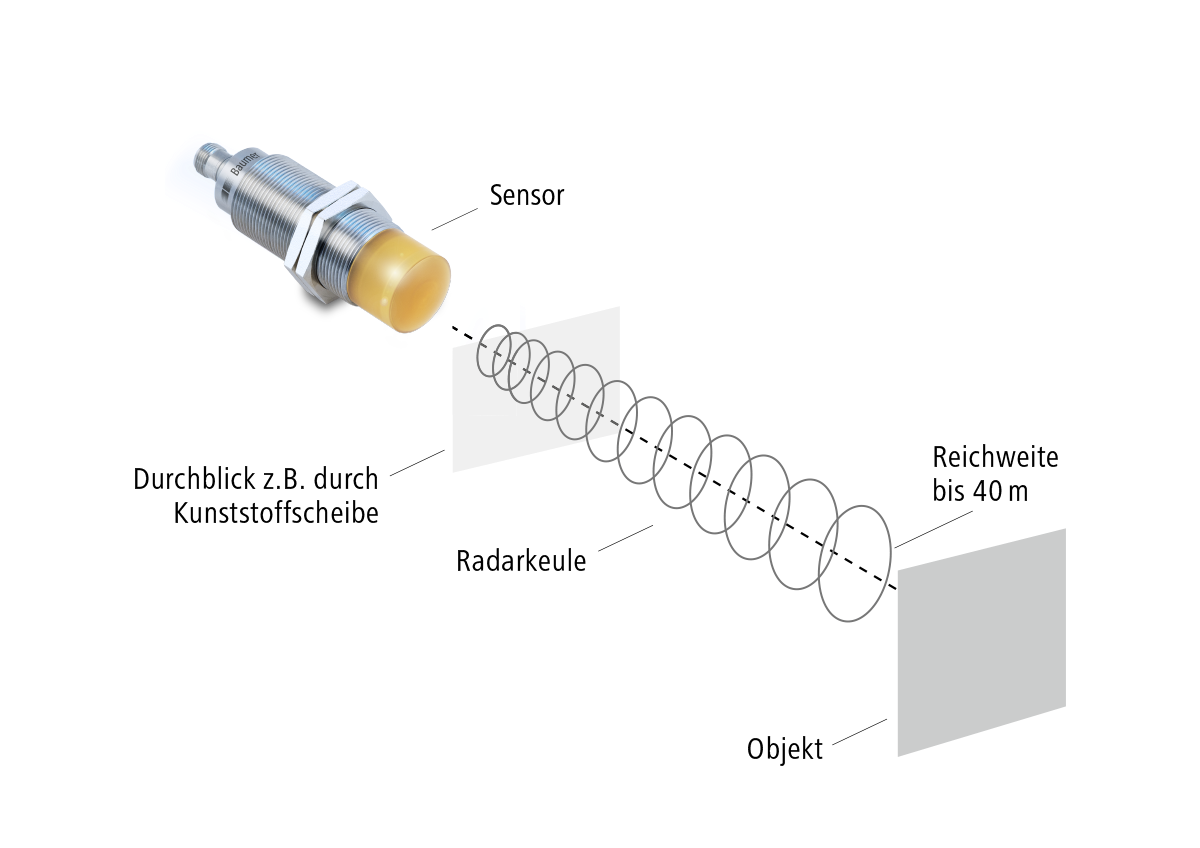
Mit dem von Baumer entwickelten Radarsensor ist es möglich eine Distanzmessung von Objekten auf grosse Distanzen durchzuführen. Neben der Distanzmessung kann auch die Relativgeschwindigkeit eines Objektes gemessen werden.
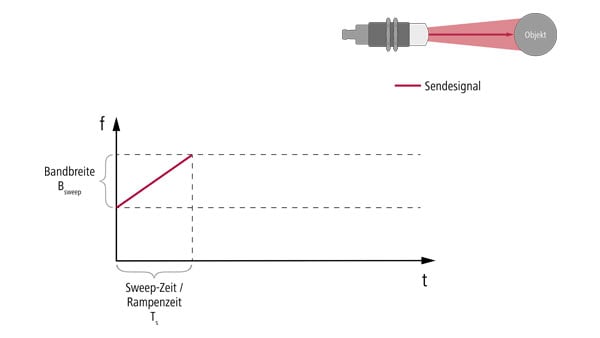
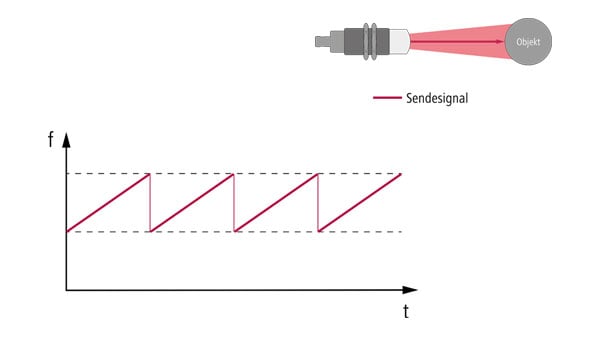
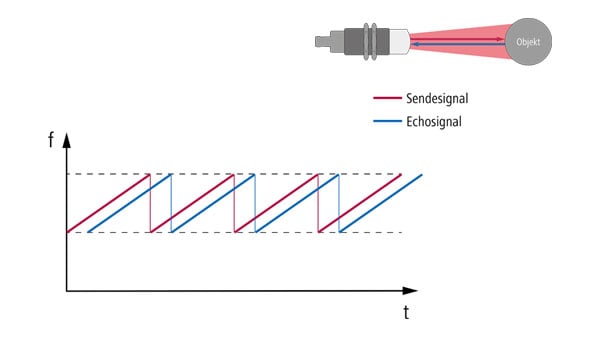
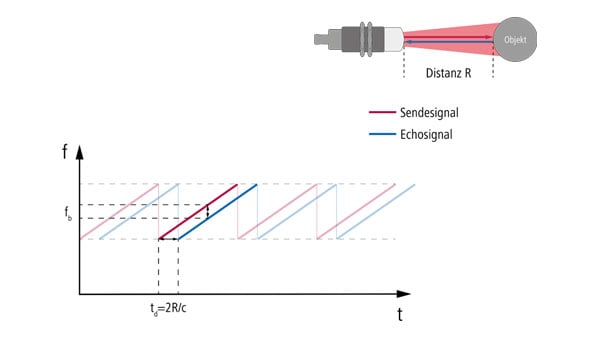
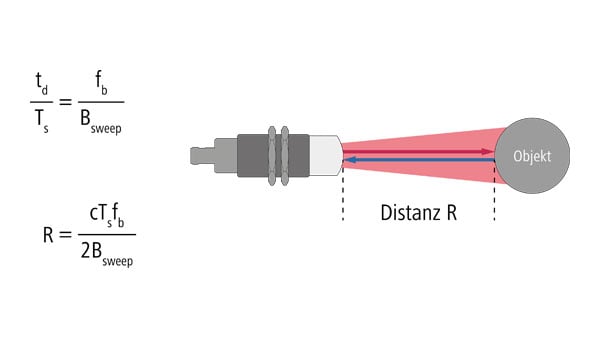
Der Sensor basiert auf der frequenzmodulierten Dauerstrichmethode (FMCW – Frequency Modulated Continuous Wave). Hierbei wird die Frequenz einer vom Sensor kontinuierlich ausgesandtenTrägerfrequenz in einem kleinen Bereich (der Bandbreite) variiert. Sobald das Signal von einem Objekt zu dem Sensor zurückreflektiert wird, kann daraus durch einen Frequenzvergleich die Distanz und die Geschwindigkeit des erfassten Objektes bestimmt werden.
Der Sensor nutzt eine sehr hohe Frequenz mit einer Wellenlänge im mm Bereich, hierdurch kann eine sehr schmale Strahlkeule erzeugt werden. Dies ermöglicht es kleine Objekte auf grossen Distanzen zielsicher und unabhängig von Störobjekten zu erfassen.