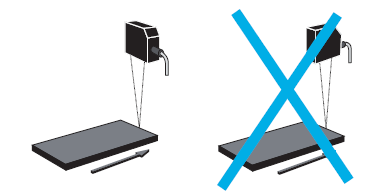
Sensor fotoelétrico de reflexão difusa com supressão de fundo
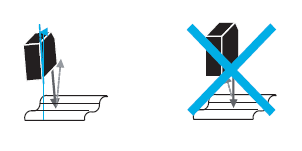
O sensor fotoelétrico difuso deve estar alinhado com o objeto. O alcance da deteção deve ser definido como uma distância entre o objeto a ser detetado e o fundo. O fundo deve ter pelo menos a distância da redução de alcance de deteção do sensor para o preto atrás do alcance de deteção definido.
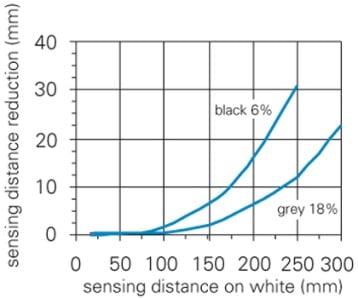
No caso de sensores fotoelétricos de reflexão difusa com supressão de fundo, o diagrama de alcance de deteção é indicado para uma configuração ideal. Ele mostra a branco a redução do alcance de deteção em função do alcance de deteção para diferentes graus de remissão. Ou seja, a que distância o alcance de deteção a preto ou cinzento é reduzido em comparação com o branco. Se inserir o alcance de deteção definido a branco no eixo X do diagrama, pode ler a redução do alcance de deteção a preto ou cinzento no eixo Y. A redução do alcance de deteção também mostra a distância mínima a que um objeto preto ou cinzento deve estar de um fundo branco.
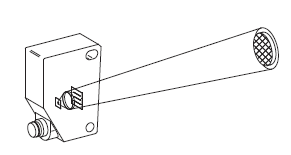
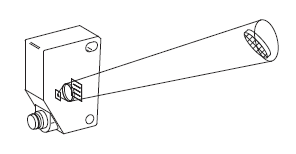
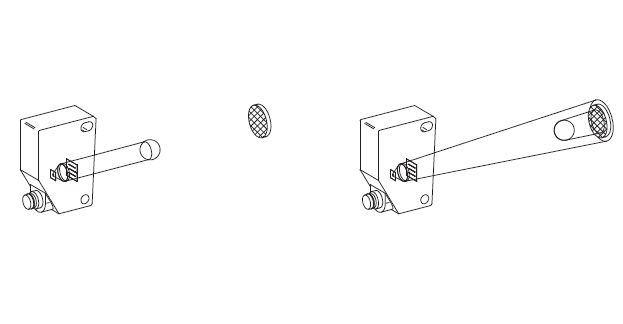
Barreiras de luz sem refletor
A barreira de luz SmartReflect deve ser alinhada com uma peça da máquina dentro da área de deteção. Esta peça da máquina é a seguir aprendida através da programação.
Deve-se observar que existe uma zona morta imediatamente à frente da peça da máquina, que é configurada automaticamente durante a programação. A zona morta é determinada especificando a área de deteção (Sa) em % da posição de fundo (Sde).
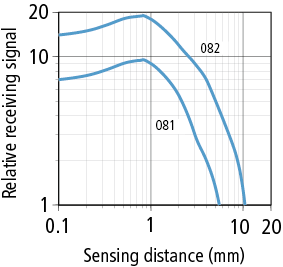
Sensor fotoelétrico de reflexão difusa com diferenciação de intensidade
No caso de sensores de reflexão difusa baseados no princípio da intensidade diferente, é indicado o sinal de receção relativo. Este representa o nível de sinal recebido para um objeto branco em função da distância. Com a ajuda deste diagrama, pode-se determinar o alcance de deteção de um objeto que não seja branco. Para isso, é necessário o fator de correção do respetivo material.
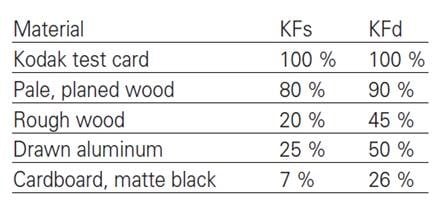
Fator de correção
O material, bem como as propriedades da superfície do objeto (de acordo com a refletividade) influenciam a distância de comutação de um sensor fotoelétrico de reflexão difusa com diferenciação de intensidade. Para determinar a distância de comutação corrigida, os seguintes valores devem ser aplicados ao sinal de receção relativo (KFs) ou aproximadamente à distância (KFd).
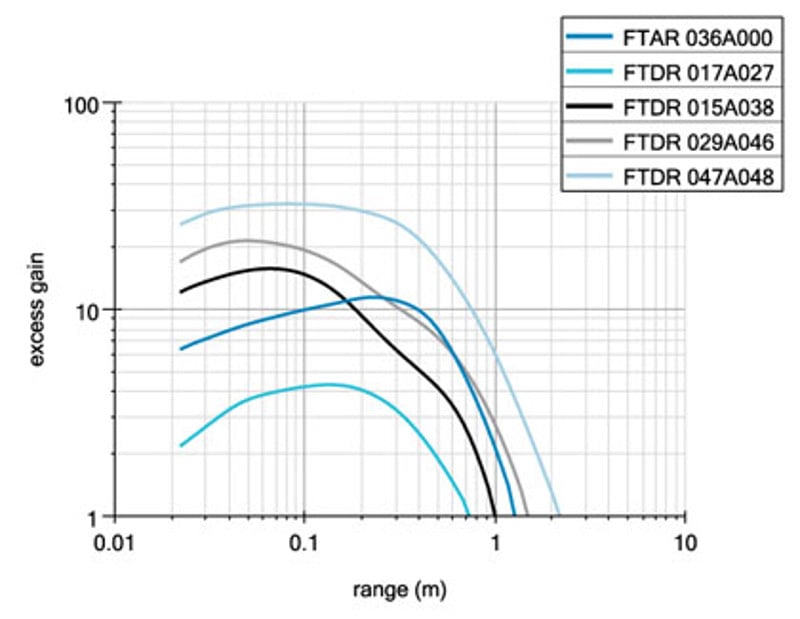
Barreiras de luz de reflexão difusa
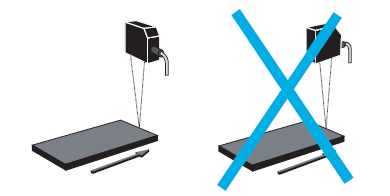
Há um diagrama de reserva de função separado para cada sensor. Visto que a segurança operacional é significativamente influenciada pelas condições ambientais, deve-se garantir que a barreira de luz funcione com a maior reserva de sinal possível.
No caso de feixes de luz estreitos, como ocorrem com os sensores laser, o tamanho do ponto de luz no refletor em relação à estrutura tripla desempenha um papel importante na seleção do refletor ou da película refletora. Até um diâmetro de ponto de 1,5 mm deve-se usar uma fita refletora especial ou um refletor para sensores de laser, até um diâmetro de ponto de 3 mm deve-se usar refletores com microestruturas. Também deve ser assegurado que a fita refletora ou o refletor não é utilizado na área do foco.
Barreira de luz unidirecional
O transmissor e o recetor devem estar alinhados um com o outro. Quanto mais estreito for o ângulo de emissão e receção, maior deve ser a precisão com que isso deve ser feito.