Os sensores ultrassônicos detectam ou medem distâncias dentro de uma faixa de medição definida sem contato e de forma confiável, independentemente das propriedades do objeto e das condições ambientais, como poeira, sujeira ou outros contaminantes. Um sensor ultrassônico emite ondas sonoras de alta frequência e mede o tempo necessário para que sejam refletidas por um objeto e retornem ao sensor. O tempo medido é então usado para calcular a distância entre o sensor e o objeto com base na velocidade com que o som viaja pelo ar. Os sensores ultrassônicos também reconhecem a presença e a posição de objetos. A faixa de medição dos sensores ultrassônicos varia de acordo com o modelo e os fatores ambientais e, normalmente, fica entre alguns centímetros e vários metros. Fatores importantes para a faixa de medição são a frequência e a amplitude das ondas ultrassônicas, bem como a potência do transmissor e a sensibilidade do receptor.
Aqui você encontrará todos os nossos sensores ultrassônicos para detecção de objetos, bem como todos os sensores de distância ultrassônicos e sensores de nível ultrassônicos.
Princípios de sensores e projeto de sensores ultrassônicos
A maioria dos sensores ultrassônicos baseia-se no princípio de medir o tempo de vôo do som entre o envio e a recepção (sensor de proximidade). O princípio da barreira determina a distância do sensor ao refletor (barreira de reflexão) ou a um objeto (barreira unidirecional) na faixa de medição.
Sensores de proximidade ultrassônicos são o tipo mais simples de detecção ultrassônica de objetos. O transmissor e o receptor estão integrados numa caixa. O ultrassom é refletido diretamente do objeto a ser detectado para o receptor. Os sensores ultrassônicos com função de programação diferem dos tipos convencionais pela sua utilização simplificada e mais diversificada simplesmente pressionando um botão.
Em contraste com os sensores de proximidade ultrassônicos, as barreiras de reflexão ultrassônicas requerem um refletor estacionário como referência, que reflete o sinal ultrassônico. Um objeto que chega entre o sensor e o refletor de referência resulta numa mudança no caminho do sinal. Isto pode ser, por exemplo, uma distância medida mais curta através de um objeto que cobre completamente o refletor, um eco adicional através de um objeto pequeno ou uma perda de eco através de objetos fortemente absorventes. Isso aciona a comutação do sensor.
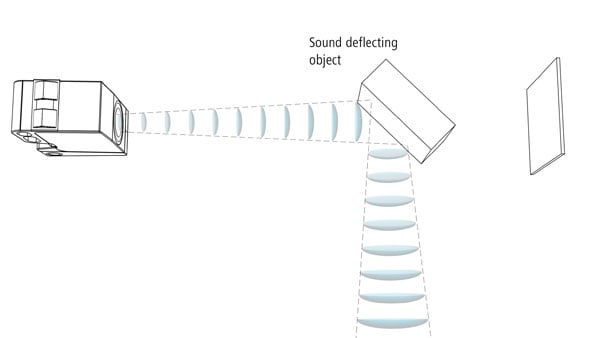
Áreas de aplicação típicas:
Objetos com formatos irregulares e com inclinações
Objetos-alvo de deflexão de som
Materiais de absorção de som, como algodão e espuma de borracha
Barreiras ultrassônicos unidirecionais oferecem tempos de resposta curtos e longo alcance. O transmissor e o receptor estão colocados em duas caixas separadas. O transmissor emite continuamente ondas sonoras que chegam ao receptor pelo ar. Se um objeto interromper as ondas sonoras, o receptor muda para o estágio de saída.
Áreas de aplicação típicas:
Detecção de objetos em rápida sucessão
Contagem de objetos feitos de materiais difíceis de detectar (recipientes de vidro, garrafas PET)
Monitorização de materiais transparentes
Controle de rasgo de película
Monitorização de nível de enchimento em tanques ou silos
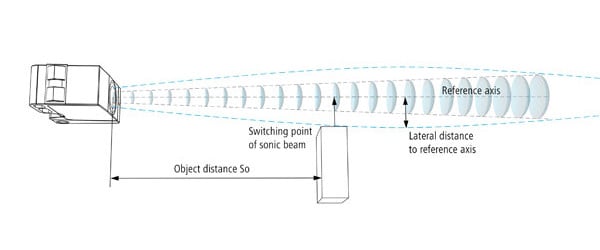
No sensor de proximidade ultrassônico é utilizado um transdutor de som especial, que permite que o envio e a recepção opcionais das ondas sonoras. O transdutor envia um certo número de ondas sonoras, que são refletidas pelo objeto a ser detectado. Após o envio do impulso, o sensor ultrassônico é comutado para o modo de recepção. O tempo até à chegada de um possível eco é proporcional à distância entre o objeto e o sensor de proximidade.
Saída digital
Só é possível uma detecção de objetos dentro da área de medição. A respectiva distância de comutação pode ser definida pelo utilizador com um potenciômetro ou aprendida através da programação. Se um objeto for detectado dentro da distância definida, o estado de comutação do sensor muda. Um LED integrado informa sobre a detecção de um objeto.
Detecção de objeto
As ondas sonoras são bem refletidas em várias superfícies. Os objetos a serem detectados podem ser sólidos, líquidos, granulares ou pulverulentos. Objetos transparentes e outros oticamente difíceis de detectar são claramente detectados com sensores ultrassônicos.
Objeto padrão
Todas as informações referem-se a um objeto quadrado e plano com os seguintes comprimentos de aresta:
15 x 15 mm com um Sde de até 250 mm
30 x 30 mm com um Sde de até 1000 mm
100 x 100 mm com um Sde > 1000 mm
O objeto padrão está perpendicular ao eixo de referência do sensor.
Tamanho
Para garantir a detecção confiável do objeto, o sinal refletido deve ser suficientemente grande. A força do sinal refletido também depende do tamanho do objeto. No caso de um objeto padrão definido, a área de detecção Sd pode ser totalmente utilizada.
Superfície
Objetos de absorção de som e os agentes com superfícies rugosas ou porosas refletem o som difusamente e, portanto, reduzem a área de medição dos sensores ultrassônicos. A área de detecção Sd pode ser totalmente utilizada se a rugosidade máxima da superfície do objeto não exceder 0,2 mm.
Objetos tipicamente absorventes de som são:
Borracha de espuma
Algodão/lã/tecidos/feltro
Materiais muito porosos
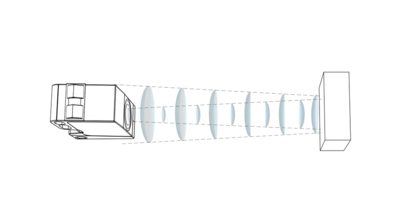
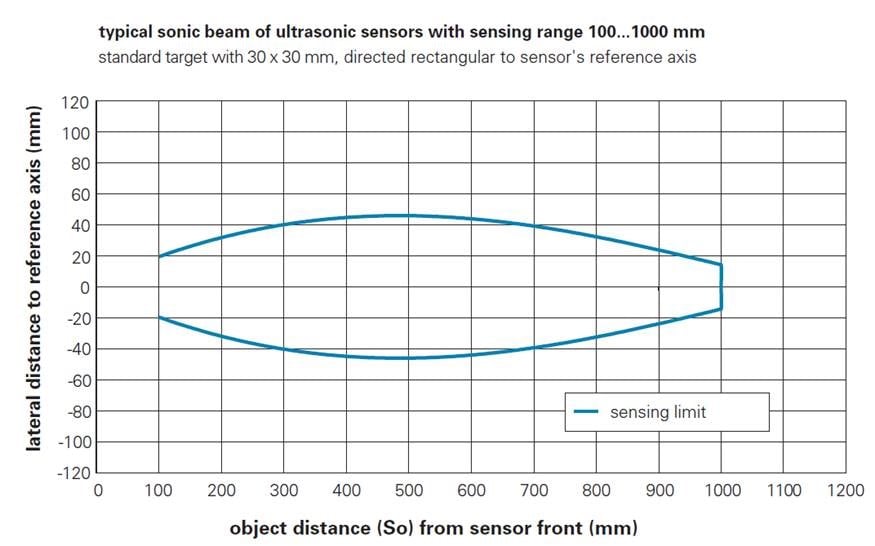
Feixes de som típicos
Os feixes de som listados nas páginas de dados mostram a área de detecção efetiva dos sensores ultrassônicos. Os feixes de som também ilustram a influência dos feixes laterais, que aumentam o ângulo de abertura dos sensores na área próxima. Devido à absorção e difusão do som no ar, os feixes de som tornam-se menores em distâncias maiores.
Os feixes de som são típicos de toda uma família de sensores. Por exemplo, o perfil 100 - 1000 mm aplica-se a todos os tipos com esta área de detecção; analógicos e digitais.
Método de medição
Para determinar os feixes de som típicos, são utilizados objetos quadrados padrão feitos de aço com os seguintes comprimentos de aresta:
15 x 15 mm com um Sde ≤ 250 mm
30 x 30 mm com um Sde ≤ 1000 mm
100 x 100 mm com um Sde > 1000 mm
Os objetos são movidos lateralmente para a área de detecção em ângulo reto com o eixo de referência do sensor e a várias distâncias. Os feixes de som típicos são criados ligando a seguir os pontos de comutação medidos. A forma do feixe de som muda quando são utilizados objetos redondos ou outras geometrias diferentes.
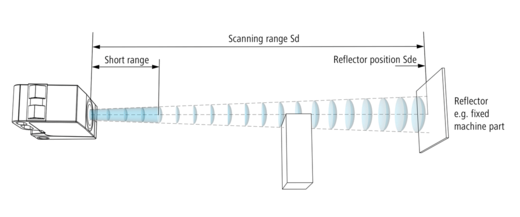
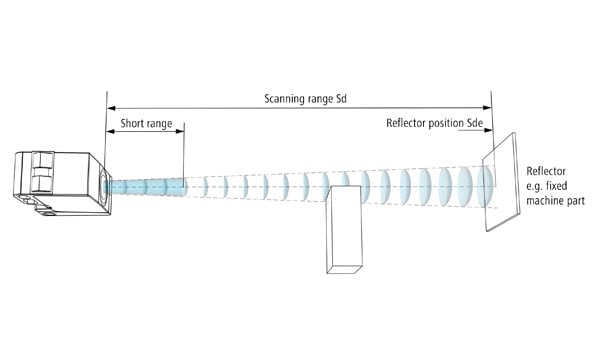
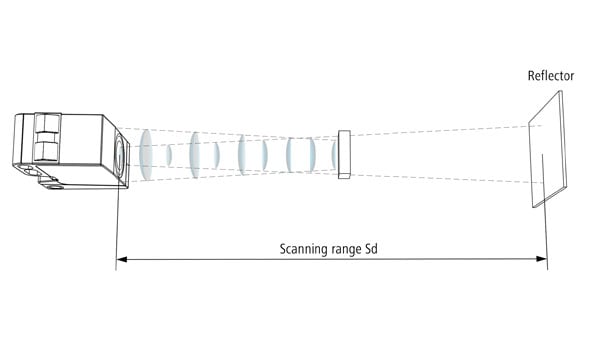
Barreiras refletoras ultrassônicos
Modo de funcionamento
Basicamente, a barreira de reflexão funciona no mesmo princípio que o sensor de proximidade ultrassônico. Em contraste com os sensores de proximidade, no entanto, elas exigem um refletor que reflita o sinal ultrassônico. Qualquer objeto estacionário que reflita o som pode ser usado como um refletor (por exemplo, até mesmo a correia transportadora, uma parede, etc.). Assim que um objeto interrompe o caminho entre o sensor e o refletor, o sensor deixa de detectar o refletor e altera o sinal na saída de comutação.
Detecção de objeto
Objeto padrão/refletor
Todas as informações referem-se a um objeto quadrado e plano com um comprimento de aresta de 30 mm (Sde> 1000 mm: comprimento de aresta de 100 mm, Sde ≥ 2500 mm: comprimento de aresta de 300 mm) que é perpendicular ao eixo de referência do sensor. O refletor deve ser feito de um bom material refletor de som com pelo menos as mesmas dimensões geométricas.
Para garantir a detecção confiável do objeto, o sinal refletido deve ser suficientemente grande. A força do sinal refletido depende do tamanho do objeto. A distância de medição Sd pode ser totalmente utilizada para o objeto padrão definido.
Vantagens
Detecção sem problemas de até 100% de materiais com absorção de som
Detecção confiável de objetos de deflexão de som
Nenhuma área cega à frente do sensor para objetos que são ≥ ao objeto padrão
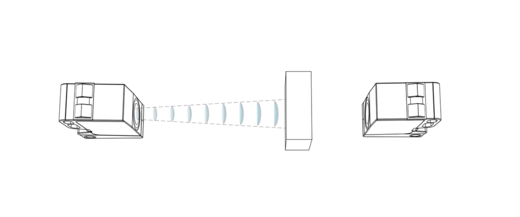
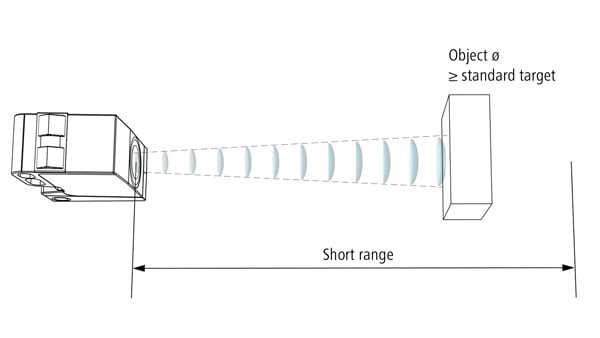
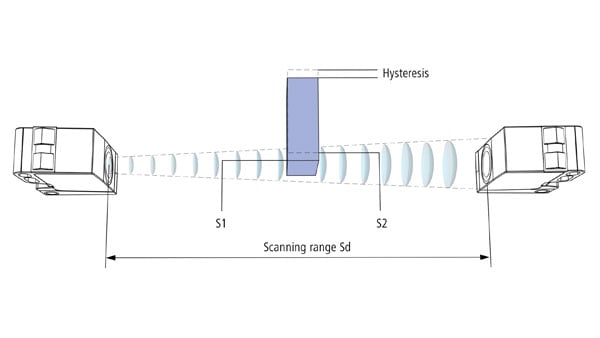
Barreiras ultrassônicos unidirecionais
Modo de funcionamento
Nas barreiras ultrassônicos unidirecionais, o transmissor e o receptor estão alojados em dois compartimentos separados. O transmissor emite continuamente ondas sonoras que chegam ao receptor pelo ar. Se um objeto interromper as ondas sonoras, o receptor muda para o estágio de saída.
Com o potenciômetro integrado no receptor, o utilizador pode ajustar a amplificação necessária do sinal de entrada precisamente para os objetos a serem detectados. O estado de saída e a intensidade do sinal recebido são indicados por um LED.
Ângulo de abertura α
O ângulo de abertura α define a extensão espacial do feixe de som cônico emitido pelo transmissor da barreira ultrassônico.
Exatidão de repetição
Devido ao estreito ângulo de abertura do feixe de som do transmissor ultrassônico, a repetibilidade do ponto de comutação S1 para dois objetos consecutivos sob condições idênticas é melhor do que 3 mm.
Histerese
A histerese define a diferença entre o ponto de ativação S1 e o ponto de desativação S2. Se um objeto de medição romper o feixe de som, é necessário um nível de sinal aproximadamente 75% maior para uma reinicialização clara do sinal de saída. Objetos em sucessão próxima são claramente detectados.
Sensores de distância ultrassônicos
Modo de funcionamento
Com sensores de medição de distância, a corrente de saída ou a tensão de saída é proporcional à distância do objeto a ser detectado. Com base no método de eco de impulso, o valor da distância medida é emitido como um valor de tensão. Dependendo do sensor, a inclinação da curva de saída pode ser alterada via potenciômetro, programação ou qTeach e adaptada de forma otimizada à resolução necessária para a respectiva aplicação. Para aplicações com longos cabos de alimentação ou elevados níveis de interferência, é recomendada a utilização do sensor ultrassônico de medição de distância com saída de corrente.
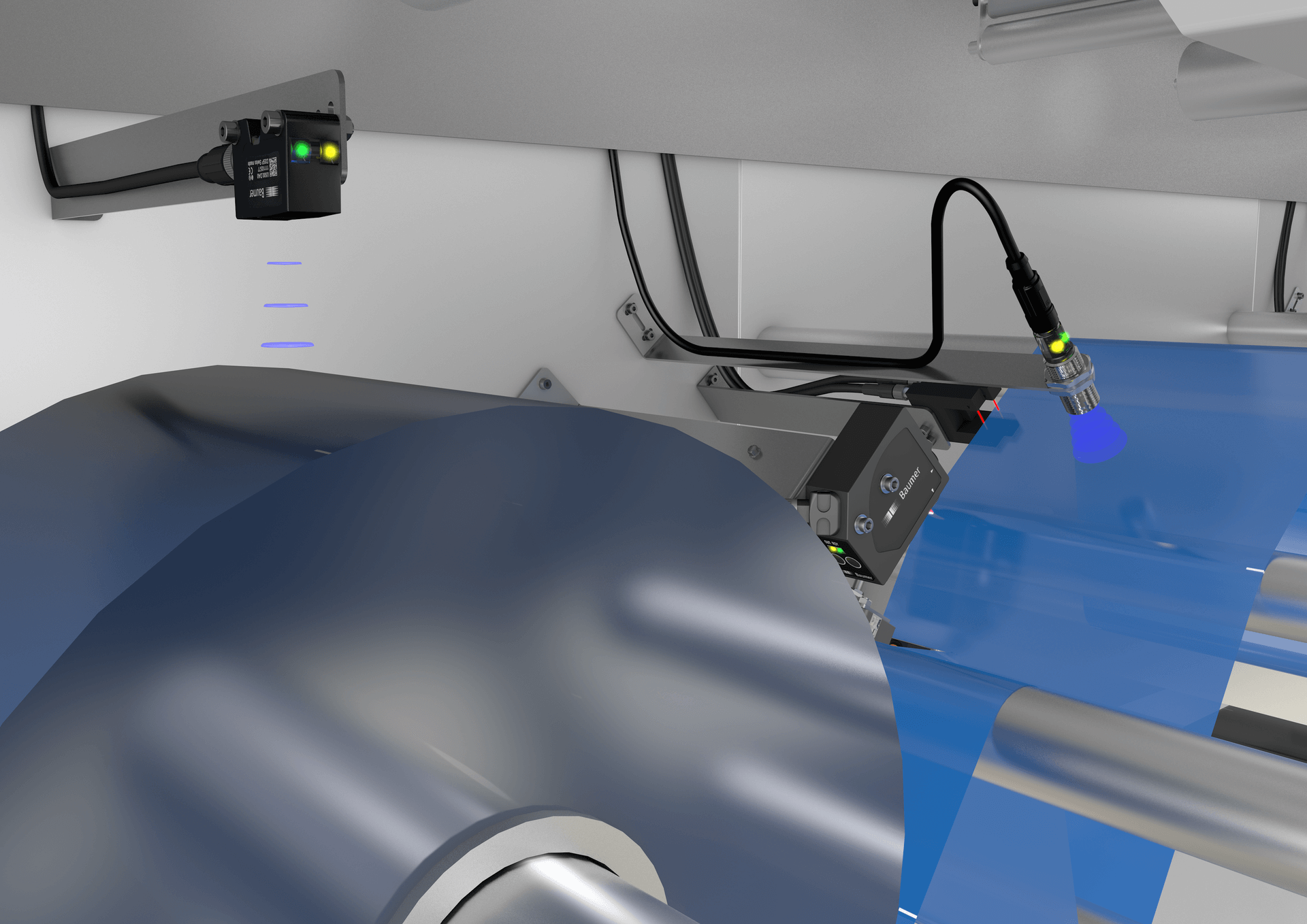
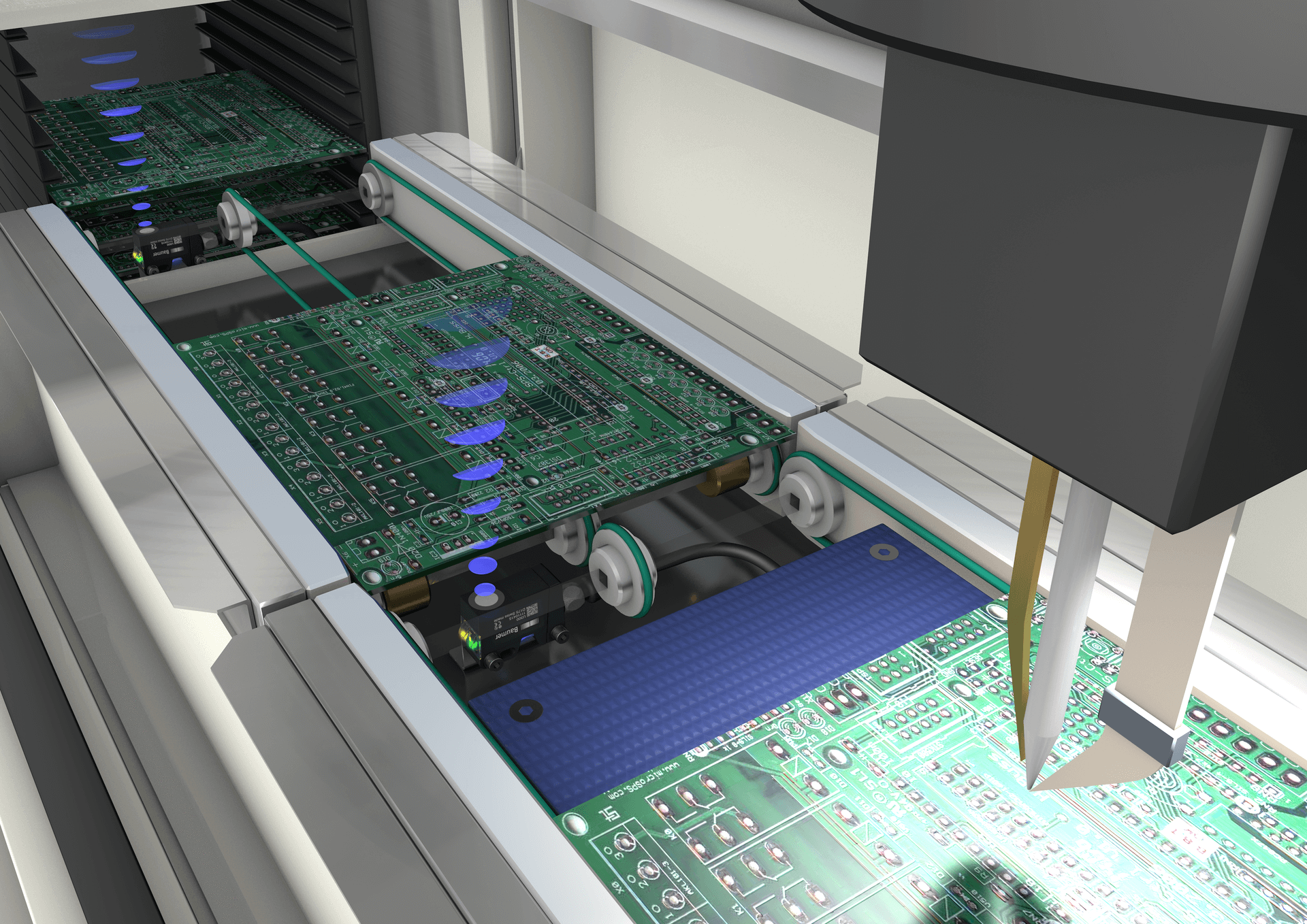
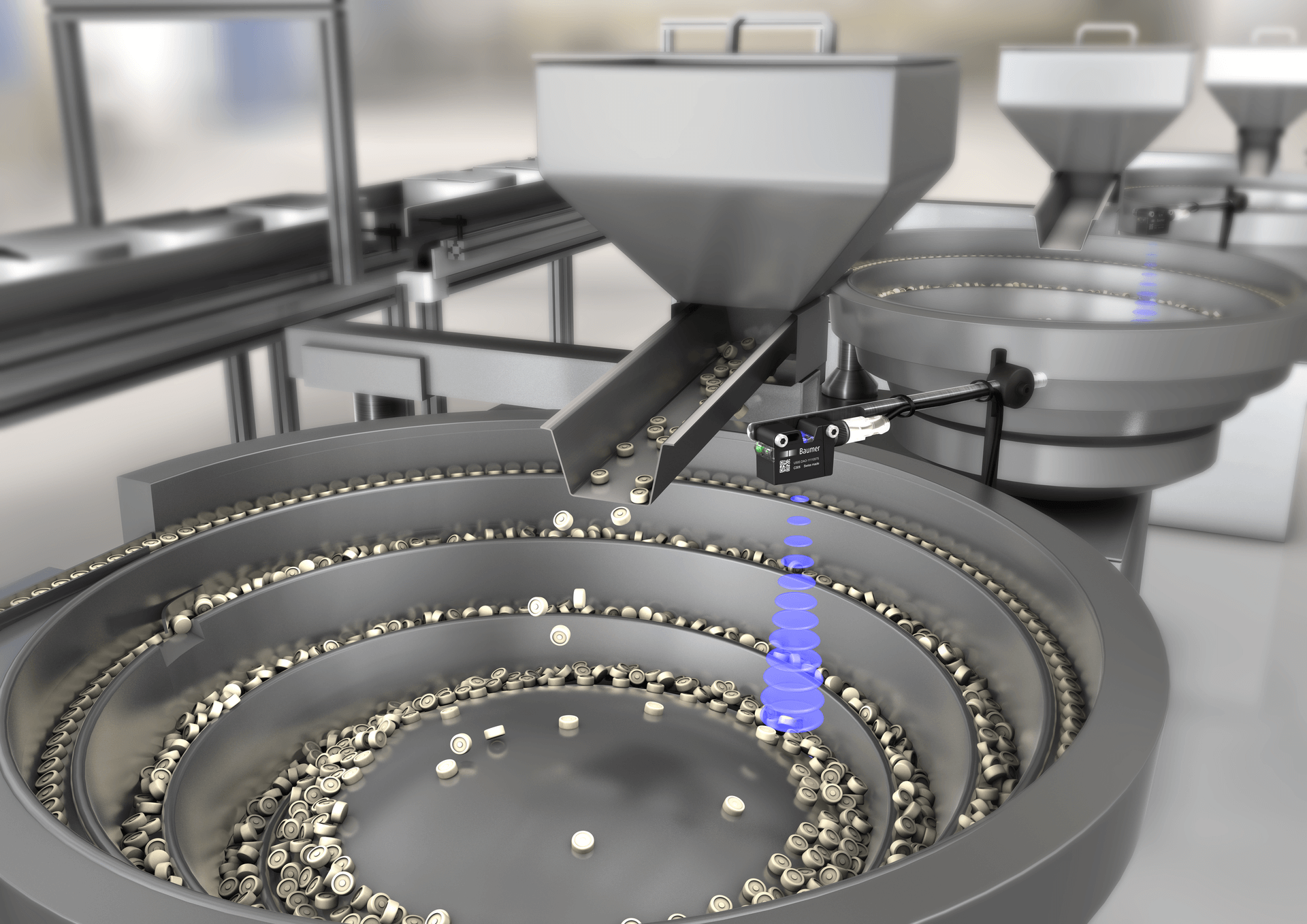
Onde os sensores ultrassônicos são usados?
Os sensores ultrassônicos são os mais versáteis entre os sensores e são adequados para quase todas as tarefas de detecção em ambientes industriais. Os objetos a serem detectados podem ser sólidos, líquidos, granulares ou pulverulentos. Eles detetam com segurança objetos que mudam de cor, transparentes ou de alto brilho. O desempenho dos sensores ultrassônicos é particularmente evidente em ambientes hostis, pois eles são extremamente tolerantes à sujidade e a confiabilidade do processo não é prejudicada por poeira, fumo, névoa ou semelhantes.
Devido à ampla gama de aplicações possíveis, os sensores ultrassônicos são usados em vários setores, como a tecnologia de embalagem, o setor de eletrônicos e a tecnologia de alimentação. Outros exemplos de aplicação de sensores ultrassônicos e suas vantagens em aplicações específicas podem ser encontrados aqui.
Aplicações típicas de sensores ultrassônicos
Detecção confiável de vários substratos, independentemente da cor, do brilho ou da transparência.
Detecção confiável de objetos com uma ampla variedade de estruturas de superfície.
Detecção de nível limite de materiais com diferentes geometrias e medição de nível de preenchimento.