International
int
Português

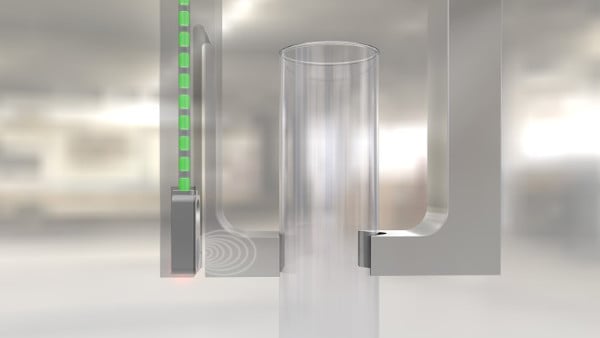
Tarefa: Medição indireta da força de preensão medindo a deslocação/flexão do dedo de preensão em forma correspondente ao agarrar.
Tarefa: Medição indireta da força de preensão medindo a deslocação/flexão do dedo de preensão em forma correspondente ao agarrar.