B
Binário de aperto de limite
Binário de aperto admissível em torno do eixo de medição do sensor de força que, quando carregado simultaneamente com a força nominal, não causa nenhuma alteração significativa e duradoura nas propriedades metrológicas do sensor de força.
Binário de flexão
Binário de flexão estático admissível que, quando carregado simultaneamente com a força nominal, não causa nenhuma alteração significativa e duradoura nas propriedades metrológicas do sensor de força.
C
Caminho de medição nominal
O caminho de medição nominal descreve o caminho que os dois pontos externos de introdução de força ou superfícies do sensor de força fazem, um em relação ao outro, na direção de medição como resultado de uma carga com força nominal. O caminho de medição nominal típico para um sensor de força de membrana é de aproximadamente 0,1 mm.
Carga
Resistência máxima de carga de uma saída de corrente. A carga é a resistência de medição (resistência de entrada da placa de medição analógica) para converter a corrente do sinal numa tensão mensurável.
CEM
Diretiva/norma sobre imunidade a interferências, emissões eletromagnéticas e radiações.
Choque DIN EN 60068-2-27
Resistência do sensor a carga de choque (choques mecânicos) sem que o sensor experimente alterações significativas permanentes nas suas propriedades de medição até à força nominal.
Consumo de corrente
O consumo máximo de corrente em condições nominais, a corrente de ativação pode ser maior por alguns ms.
D
Deformação nominal
A deformação nominal é a deformação para a qual o sensor está nominalmente concebido, ou seja, até a qual as especificações metrológicas são cumpridas. Nas informações a seguir, a indicação percentual refere-se sempre à deformação nominal.
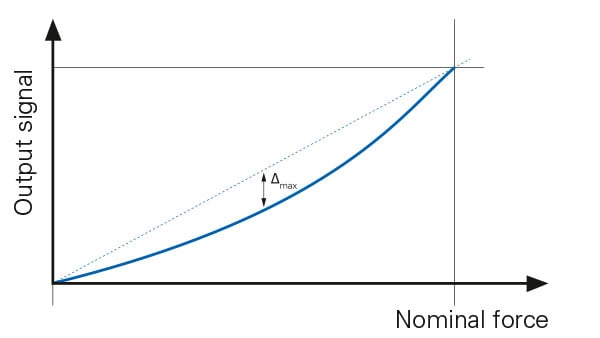
Desvio de linearidade
O desvio de linearidade é o desvio máximo de uma curva característica de um sensor determinado com força crescente da linha reta de referência até ao ponto zero em condições ideais de instalação. A linha reta de referência é uma função de compensação de primeiro grau, cuja inclinação é determinada de tal forma que a soma dos quadrados de todos os desvios do sinal da linha reta de referência resulta num mínimo (na literatura: método dos quadrados de erro mínimos). A principal causa da não linearidade é frequentemente uma introdução não simétrica de força.
Desvio do ponto zero
O desvio do ponto zero descreve o desvio máximo do sinal zero no estado desmontado do valor zero em relação ao valor característico nominal. Nos sensores de força abaixo de 100 N, certificar-se de que o sensor assenta sobre uma superfície plana sem força.
F
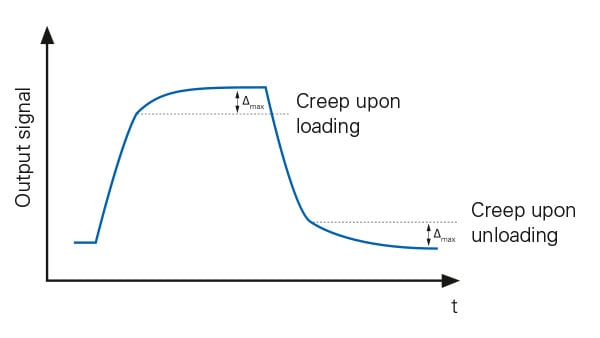
Fluência
Fluência descreve a alteração dependente do tempo no sinal de saída do sensor de força com carga constante. É feita uma distinção entre fluência de carga e fluência de alívio. Na fluência de carga, a alteração no sinal de medição com força constante é examinada por um longo período de tempo. No caso de fluência de alívio, o sensor de força é primeiro carregado com uma força nominal constante. Após o alívio, a alteração no sinal de medição no estado aliviado é então avaliada.
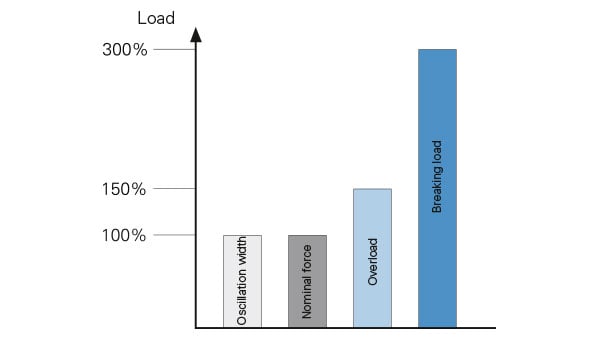
Força de rutura mínima
A força de rutura mínima descreve a força do sensor de força a partir da qual é esperada uma destruição mecânica. Com uma carga acima da força de rutura mínima, deixa de ser recomendada a continuação da utilização do sensor.
Força nominal
A força nominal é a força para a qual o sensor está nominalmente concebido, ou seja, até a qual as especificações metrológicas são cumpridas. Dependendo do tipo, pode ser feita uma distinção entre as forças nominais de tração e compressão. Nas informações a seguir, a indicação percentual refere-se sempre à força nominal.
Força transversal limite
Força transversal estática admissível que, quando carregada simultaneamente com a força nominal, não causa nenhuma alteração significativa e duradoura nas propriedades metrológicas do sensor de força.
Frequência de ressonância básica
Frequência de ressonância com a qual o sensor de força descarregado oscila sem partes de introdução de força após excitação tipo choque na direção do eixo de medição, com a sua base prevista para fixação acoplada a uma massa suficiente.
Frequência limite
Nesta frequência, o sinal de saída é atenuado em 3 dB (para cerca de 70,7%).
H
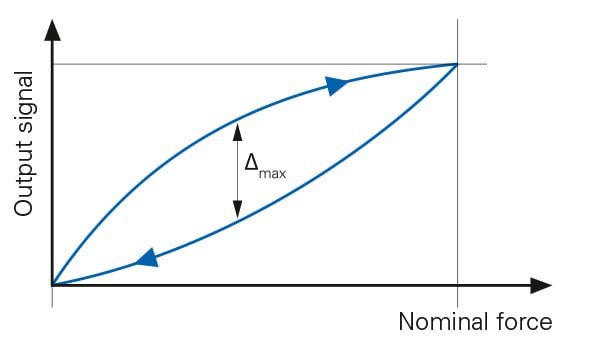
Histerese
A diferença entre os sinais de saída de uma série ascendente e descendente com a mesma carga, baseada no sinal de saída com carga crescente em condições ideais de instalação, é conhecida como histerese ou na literatura também como amplitude reversa. Os fatores de influência são a histerese do material do corpo do sensor, a histerese no princípio de medição e as influências de atrito externo devido à configuração da medição.
I
Impulso para tarar
O impulso para tarar é o tempo mínimo em que \(U_{Ta}\) deve ser excedido para iniciar a tarar.
Intervalo de temperatura de armazenamento
Intervalo de temperatura no qual o sensor pode ser armazenado mecânica e eletricamente sem esforço, sem que seja detetável uma alteração significativa e permanente nas suas propriedades metrológicas quando o sensor é reutilizado dentro do intervalo de temperatura operacional.
Intervalo de temperatura operacional
O intervalo de temperatura operacional descreve o intervalo de temperatura no qual o sensor cumpre as propriedades metrológicas.
Intervalo de tensão operacional
Neste intervalo de tensão, o sensor pode ser operado continuamente em todo o intervalo de temperatura operacional sem que os limites das propriedades de medição sejam excedidos e o circuito de proteção elétrico seja prejudicado.
Intervalo para tarar
Dentro deste intervalo, o sensor é capaz de tarar e definir o sinal de saída para o sinal zero.
P
Polaridade de sinal positiva
Alteração positiva no sinal de saída com uma direção definida da variável de entrada.
Pontes - resistência de entrada
Resistência óhmica entre as ligações de alimentação +VS e -VS de um sensor passivo.
Pontes - resistência de saída
Resistência óhmica entre as saídas de sinal Sig+ e Sig- de um sensor passivo.
Processo de tarar ativo
Esta tensão deve ser aplicada pelo menos na entrada da tara para que o processo de tarar possa ser seguramente iniciado.
Processo de tarar inativo
Esta tensão não deve ser excedida na entrada da tara para que o processo de tarar seguramente não seja iniciado.
Proteção contra corrosão
A proteção contra corrosão descreve a categoria de corrosividade da diretiva DIN EN ISO 12944-2 de acordo com a qual o sensor pode ser utilizado sem problemas em certas condições ambientais.
R
Random DIN EN 60068-2-64
Resistência do sensor a vibrações sem que o sensor experimente alterações significativas permanentes nas suas propriedades de medição até à força nominal.
Repetibilidade
A repetibilidade descreve a exatidão do sensor quando a posição de instalação não é alterada. A diferença máxima entre os sinais de saída para a mesma força é determinada a partir de várias séries de medições com a posição de instalação não alterada. A repetibilidade é particularmente importante para sensores de força que são instalados uma vez.
Reprodutividade
A reprodutibilidade descreve a exatidão do sensor quando a posição de instalação é alterada. A diferença máxima entre os sinais de saída para a mesma força é determinada a partir de várias séries de medições em diferentes posições de instalação. A reprodutibilidade é particularmente importante para sensores de força que medem temporariamente e são frequentemente instalados e removidos.
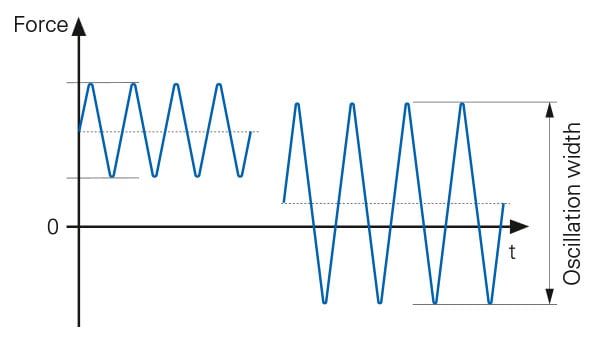
Resistência à fadiga
Limite de carga com base na força nominal, até à qual o sensor consegue experimentar pelo menos mais de 1 milhão de ciclos de carga dinâmica sem alterações permanentes nas propriedades metrológicas. Frequentemente encontrado na literatura sob o termo do intervalo de vibração relativo.
Resistência da ponte
Resistência óhmica de toda a ponte de medição.
Resistência de carga
Resistência de entrada mínima do sistema de medição ligado.
Resistência de isolamento
Resistência óhmica, medida entre quaisquer linhas de ligação e o corpo do sensor sob uma tensão de teste definida.
Resolução de medição
Menor subdivisão possível dos valores de medição transmissíveis em sistemas digitais.
Rigidez do sensor
A rigidez do sensor é definida como a razão entre a força e a deformação axial do corpo do sensor. A frequência de ressonância fundamental do sensor pode ser influenciada de forma decisiva com a ajuda da rigidez do sensor.
Ruído
Valor efetivo do ruído do sinal de saída no intervalo de frequência especificado.
S
Sinal de saída
Tipo de sinal de saída do sensor com amplificador elétrico. O sinal de saída é proporcional à força nominal. Para um sensor de força de 100 N com uma saída de tensão de 0 – 10 V, 0 V 0 N e 10 V correspondem a uma força nominal de 100 N.
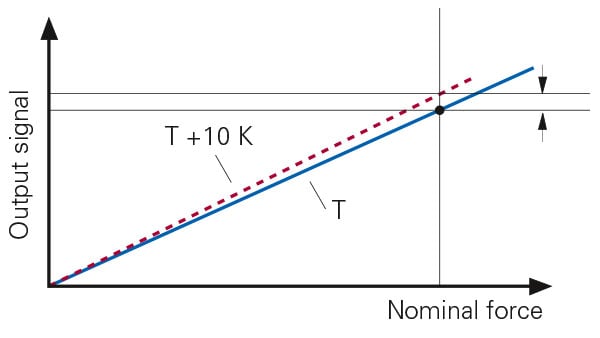
Sinal zero TK
\(TK_{0}\) descreve a alteração relativa ao valor característico do sinal zero do sensor de força como resultado de uma alteração na temperatura ambiente \(T_{i}\) em 10 K. A especificação é dada em % por 10K.
Sobrecarga
Sobrecarga é a força até a qual o sensor de força ainda está totalmente funcional após uma única carga e continua a cumprir as especificações técnicas. O sensor não apresenta nenhuma deformação plástica.
T
Taxa de medição
A taxa de medição descreve a taxa de amostragem interna do sinal do sensor analógico.
Tempo para tarar
O sensor necessita deste tempo máximo para realizar o processo de tarar.
Tensão da ponte
Tensão de alimentação estabilizada para o sensor passivo.
Tipo de proteção DIN EN 60529
O grau de proteção indica até que ponto o sensor está protegido contra humidade e poeira, bem como contra a entrada de corpos estranhos.
Tolerância de valor característico/de sensibilidade
Desvio relativo do valor característico sob carga nominal em relação ao valor característico nominal.
V
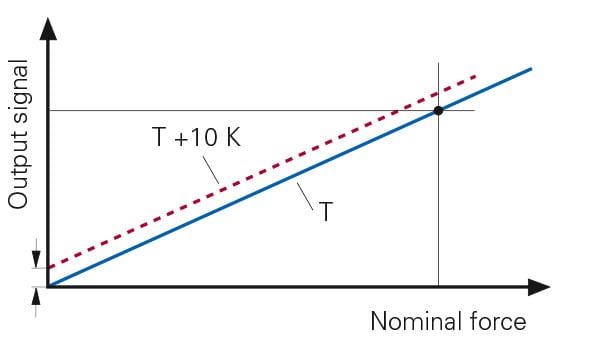
Valor carcterístico TK
\(TK_{E}\) descreve a alteração relativa no valor característico do sensor de força como resultado de uma alteração na temperatura ambiente \(T_{i}\) em 10 K. A especificação é dada em % por 10K.
Valor de característica nominal \(U_{E}\)
Sinal de saída raciométrico de um sensor passivo com força nominal. O sinal de saída comporta-se proporcional à tensão da ponte \(U_{E}\).
Vibração DIN EN 60068-2-6
Resistência do sensor a movimentos de oscilação sinusoidal forçados com um determinado grau de gravidade sem que, por isso, sejam detetáveis alterações significativas permanentes nas suas propriedades de medição até à força nominal.