Singapore
sg
English
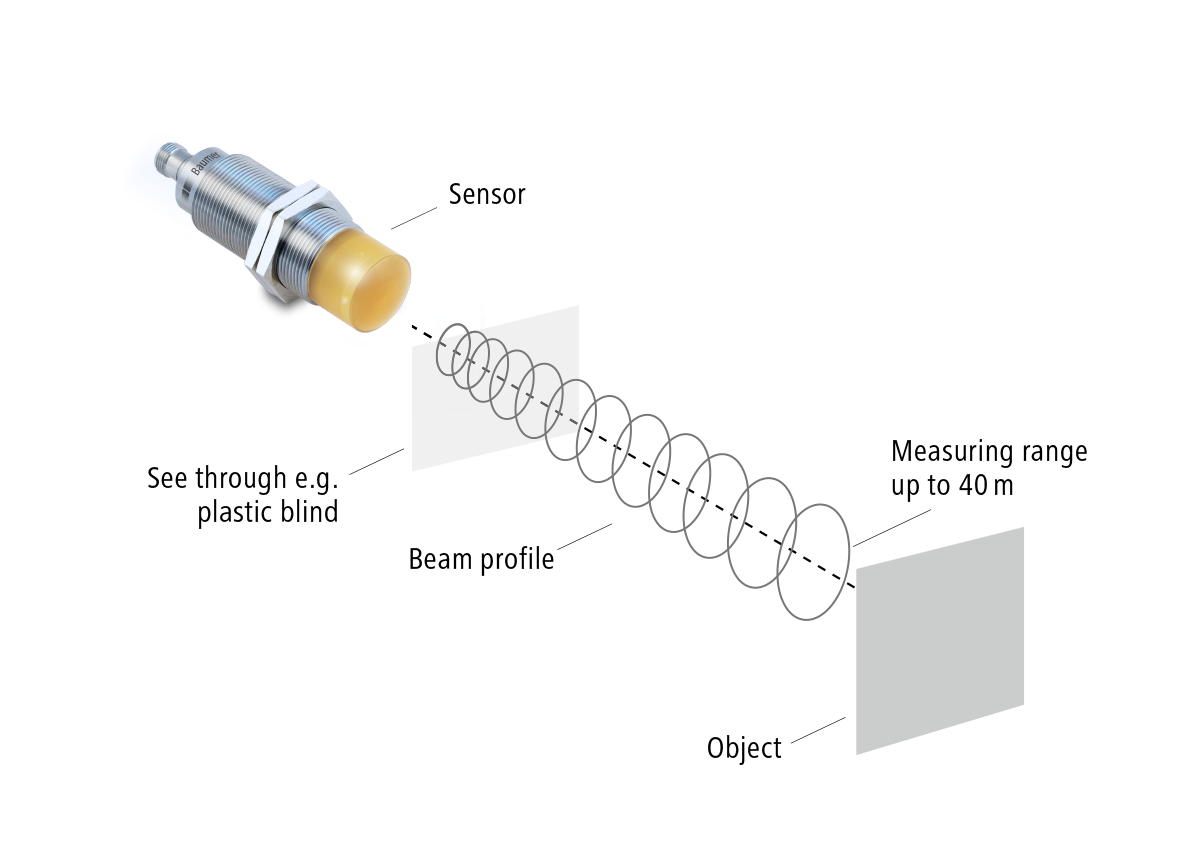
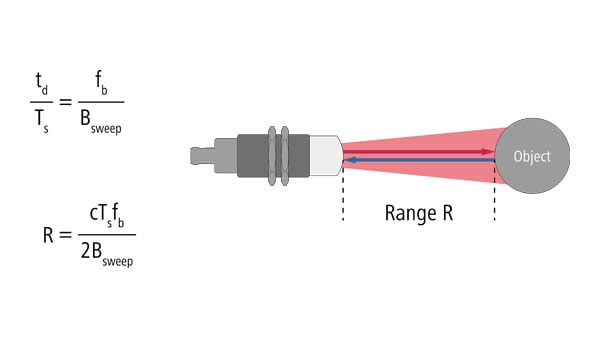
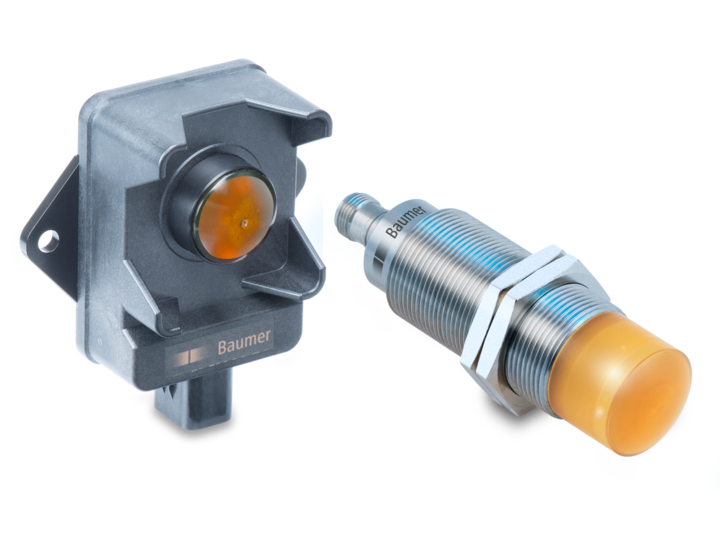
The radar sensor developed by Baumer enables you to measure the distance of objects over wide distances. Aside from distance measurements, it is also possible to measure the relative speed of the detected object.
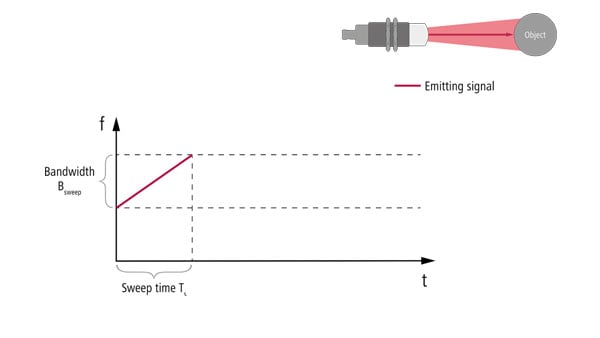
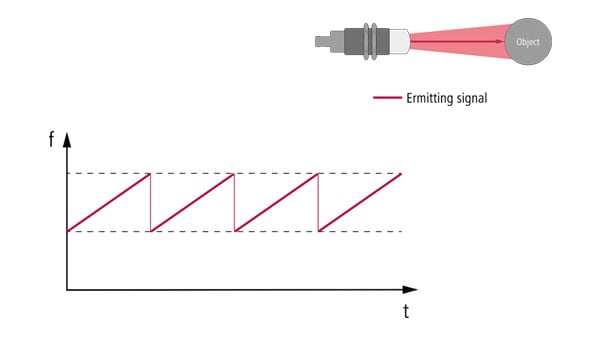
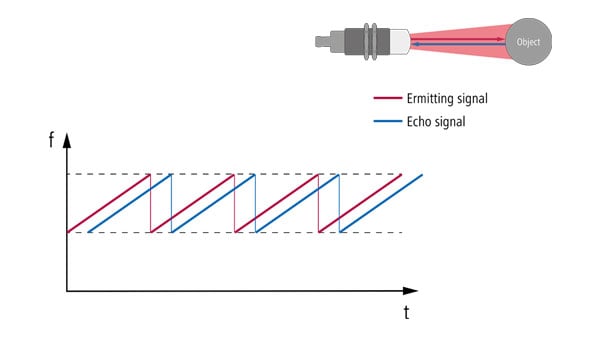
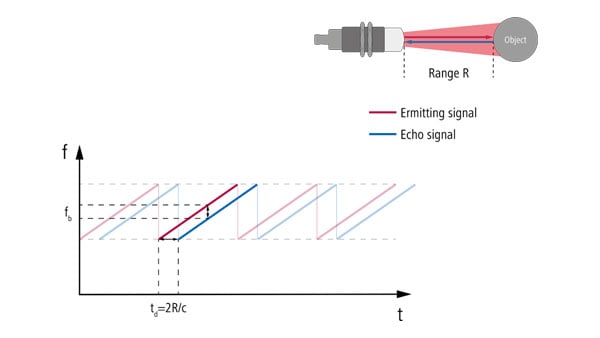
The sensor is based on the Frequency Modulated Continuous Wave (FMCW) technology. Here the carrier frequency is constantly modulated within a small range (the bandwidth). As soon as the signal is reflected back from an object, it is possible to measure the distance and the speed of the object through frequency comparison.
The sensor utilizes a very high carrier frequency, this allows to generate a very narrow beam cone. This allows to detect even small objects, without interference from neighbouring objects over large distances.