Ultrasonic sensors reliably detect or measure distance within a defined measuring range without contact, no matter which object properties and ambient conditions, e.g. presence of dust, dirt. Ultrasonic sensors emit high-frequency sound waves to measure the time elapsed until being reflected by the object and returning to the sensor. The time measured is used to calculate the distance between sensor and object on the basis of the sound wave travel speed. Ultrasonic sensors also detect presence and position of objects. The measuring range of ultrasonic sensors varies depending on the sensor variant and ambient factors; typical ranges vary between a few centimeters and several meters. Key for the measuring range are frequency and amplitude of the ultrasonic waves as well as the transmitter performance and receiver sensitivity.
Sensor principles and structure of ultrasonic sensors
Most ultrasonic sensors are based on the principle of measuring the propagation time of sound between send and receive (proximity sensor). The barrier principle determines the distance from the sensor to the reflector (retro-reflective sensor) or to an object (through-beam sensor) in the measuring range.
Ultrasonic proximity sensors are the simplest form of ultrasonic object detection. The transmitter and receiver are integrated in one housing. The ultrasound is reflected directly from the object to be measured to the receiver. Ultrasonic sensors with teach-in function differ from conventional types in that they offer easier and more varied operability with the simple push of a button.
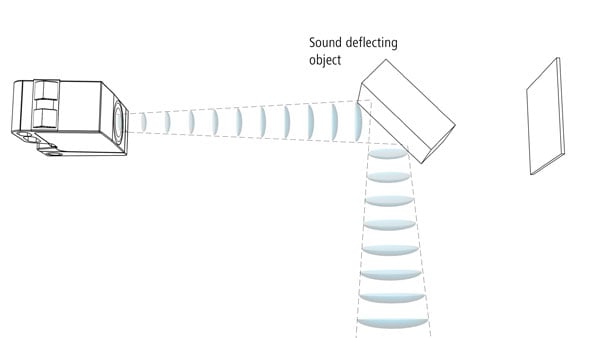
The retro-reflective sensor operates in accordance with the same principle as the ultrasonic proximity sensor. Sound propagation measurement determines the distance from the sensor to the reflector or to an object in the measuring range. Any sound reflecting, stationary object can be used as the reflector.
Typical applications:
Irregularly shaped and inclined objects
Sound deflecting target objects
Sound absorbing materials such as cotton and foam rubber
Ultrasonic through-beam sensors have short response times and large ranges. The transmitter and receiver are accommodated in two separate housings. The transmitter permanently emits sound waves through air to the receiver. The receiver switches through the output stage when an object interrupts the sound waves.
Typical applications:
Detection of object in fast succession
Counting objects from materials that are difficult to detect (glass containers, PET bottles)
A special sonic transducer is used for the ultrasonic proximity sensors, which allows for alternate transmission and reception of sound waves. The sonic waves emitted by the transducer are reflected by an object and received back in the transducer. After having emitted the sound waves, the ultrasonic sensor will switch to receive mode. The time elapsed between emitting and receiving is proportional to the distance of the object from the sensor.
Digital output
Sensing is only possible within the detection area. The required sensing range can be adjusted with the sensor's potentiometer or by electronic Teach-in (Teach-in button or remote Teach-in). If an object is detected within the set area, the output will change state which is visualized by the integrated LED.
Target detection
Sonic waves are best reflected from hard surfaces. Targets may be solids, liquids, granules or powders. In general, ultrasonic sensors are deployed for object detection where optical principles would lack reliability.
Standard target
The standard target is defined as a square flat object of following sizes:
15 x 15 mm for Sde up to 250 mm
30 x 30 mm for Sde up to 1000 mm
100 x 100 mm for Sde > 1000 mm
The target should be mounted perpendicular to the axis of the sensor.
Size
To ensure a reliable object detection, the reflected signal must be large enough. The intensity of the signal depends on the size of the object. Using a standard object, the full scanning distance Sd is available.
Surface
Detection of sound absorbent materials will result in a reduction of the maximum sensing distance. The maximum sensing distance can be achieved as long as the maximum roughness of the object does not exceed 0,2 mm.
Typical sound absorbing materials are:
foam rubber
cotton / wool / cloth / felt
very porous materials
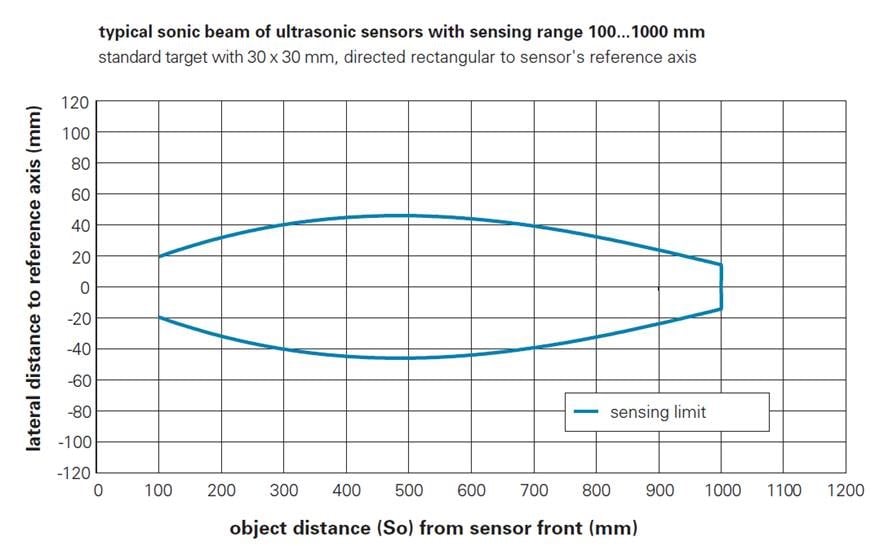
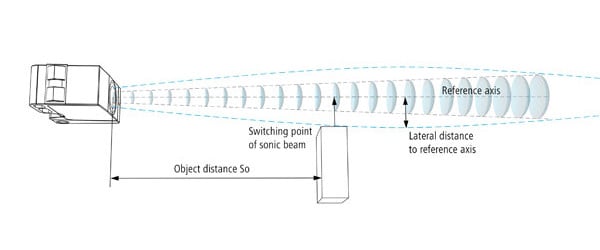
Sonic cone profiles
The sonic cone profile charts as found in the spec sheets of this catalog represent the active sensing areas for ultrasonic sensors. The charts demonstrate the short-range sonic side lobes, which widen the sensor's close-range aperture angle. Due to sound absorption and air diffusion, the lobes decrease at longer ranges. Size, shape, surface properties and the direction of target detection have very high influence on the lateral detecting region of an ultrasonic sensor. Sonic cone profiles apply to the whole product family, e.g. a 100 - 1000 mm profile is representative for all related sensors of the same sensing range - digital or analog outputs, etc.
Measuring method
Standard square targets made of steel are used to determine the shape of typical sonic cone profiles.
15 x 15 mm for Sde up to 250 mm
30 x 30 mm for Sde up to 1000 mm
100 x 100 mm for Sde > 1000 mm
The targets are positioned perpendicularly to the sensor's reference axis, approached sideways at different distances. The sonic cone profile is then plotted by connecting the measured points with a line. The cone shape can vary if round or differently shaped objects are detected.
Ultrasonic retro-reflective sensors
Design and operation
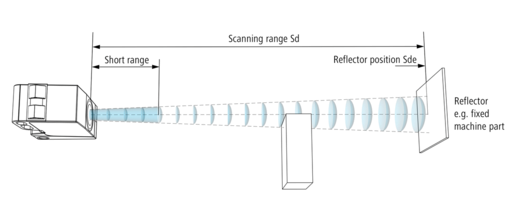
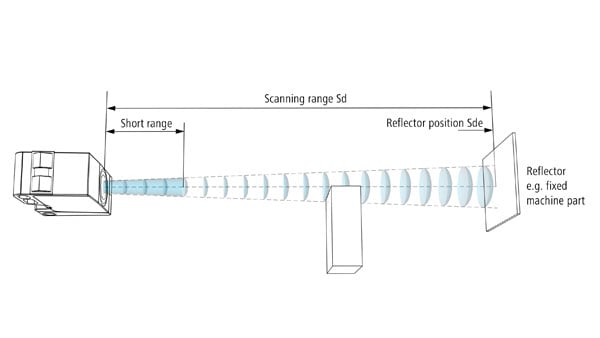
The retro-reflective ultrasonic sensor is similar in operation to the ultrasonic proximity sensor. The distance from the sensor to the reflector or to an object within the sensing distance is determined by measuring the propagation time. Any sound reflecting, stationary object can be used as a reflector. The sensing distance Sd (distance sensor-reflector) can be adjusted to the set up conditions with the sensor's potentiometer. As long as the measured propagation time of the ultrasonic signal corresponds to the distance from the sensor to the reflector, the device is in the non-active state. When an object comes within the sensing distance, the propagation time changes and the sensor changes to the active state. This also allows detection of sound absorbent and sound deflecting objects.
Object detection
Standard object/reflector
The standard target is defined as a square, level object with an edge length of 30 mm (Sde > 1000 mm: 100 mm edge length, Sde ≥ 2500 mm: 300 mm edge length) which is perpendicular to the sensor reference axis. The reflector must be made of a material with good sound reflection properties and be at least the same size as the target.
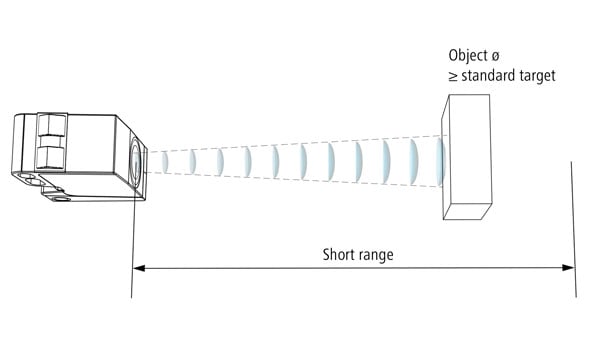
For reliable detection, the sound cone must be covered completely so that no echo is returned from the reflector. The object diameter necessary for this is at least 30 mm in URDK 30 and at least 100 mm in URAM 50.
To ensure reliable object detection, the reflected signal must be strong enough. The strength of the reflected signal is dependent on the size of the object. For a standard object, or larger, the full sensing distance Sd is available.
Advantages
Easy detection even for 100 % sound absorbent materials
Reliable detection of sound deflecting objects
No blind region in front of the sensor for objects ≥ standard object
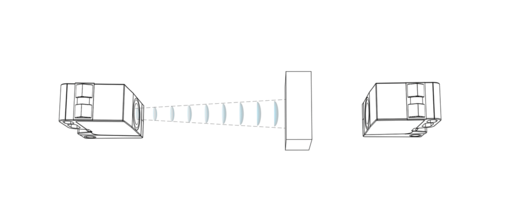
Ultrasonic through-beam sensors
Design and operation
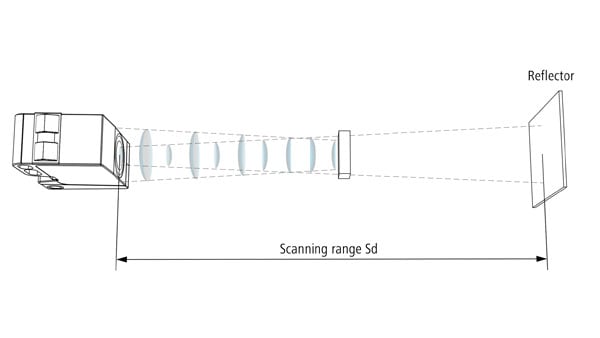
The emitter and the receiver are in two separate housings. The continuous signal by the emitter is picked up by the receiver. An object interrupting the sonic beam will make the receiver react by giving an output signal. The user may adjust the amplification of the input signal where required. When an object interrupts the sonic beam, the receiver will react and give an output signal.
With the help of the built in potentiometer, the user can adjust the amplification of the input signal, as necessary.
The state of the output stage as well as the signal intensity are indicated by an LED.
Sonic beam angle α
The sonic beam angle (α) defines the boundaries of the emitted conical beam of the ultrasonic through-beam sensor.
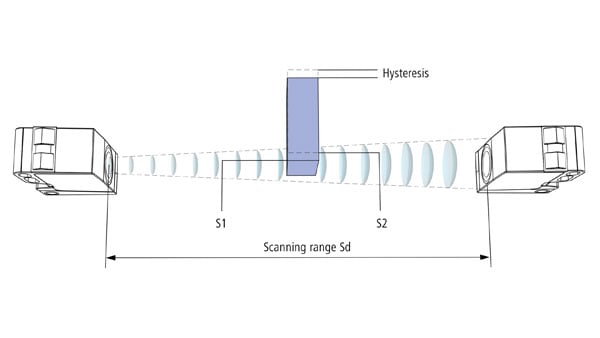
Repeatability
Due to the narrow angle of the sonic beam the repeatability of the switching point of two successive targets, under identical conditions, is better than 3 mm.
Hysteresis
Hysteresis is the difference between the operating point (S1) and the release point (S2). If an object interrupts the sonic beam, the signal level must be increased by about 75 % in order to reset the output signal. Objects which follow one another in quick succession can therefore be easily detected.
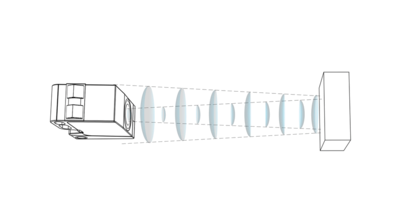
Ultrasonic distance sensors
Design and operation
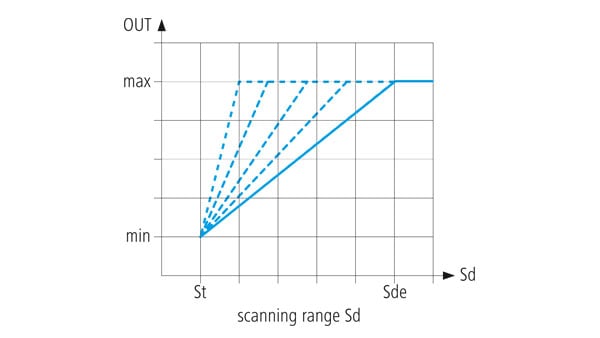
The sensor provides a distance proportional analog current or analog voltage output, allowing simply applied, non-contact distance measurement. Based on the pulse echo technique, the measured distance value is output as a voltage value.
With distance measuring sensors, the output current or the output voltage is proportional to the distance of the object to be detected. The steepness of the output curve can be modified, depending on the sensor, via a potentiometer, teach-in or qTeach and optimally adapted to the respective application. Applications having long cable runs where there might be EMI or RFI interferences, should use sensors with an analog current output.
Where are ultrasonic sensors used?
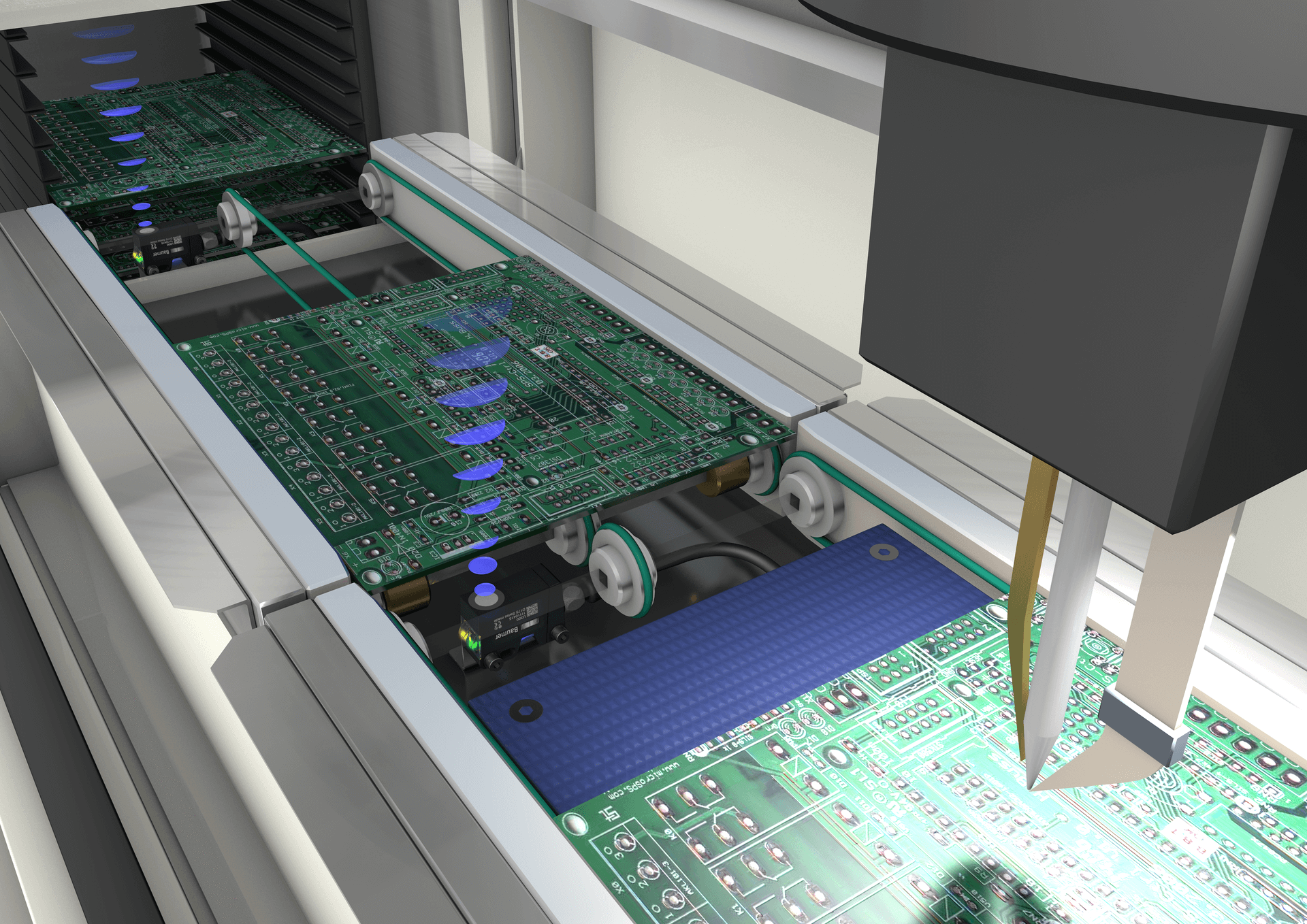
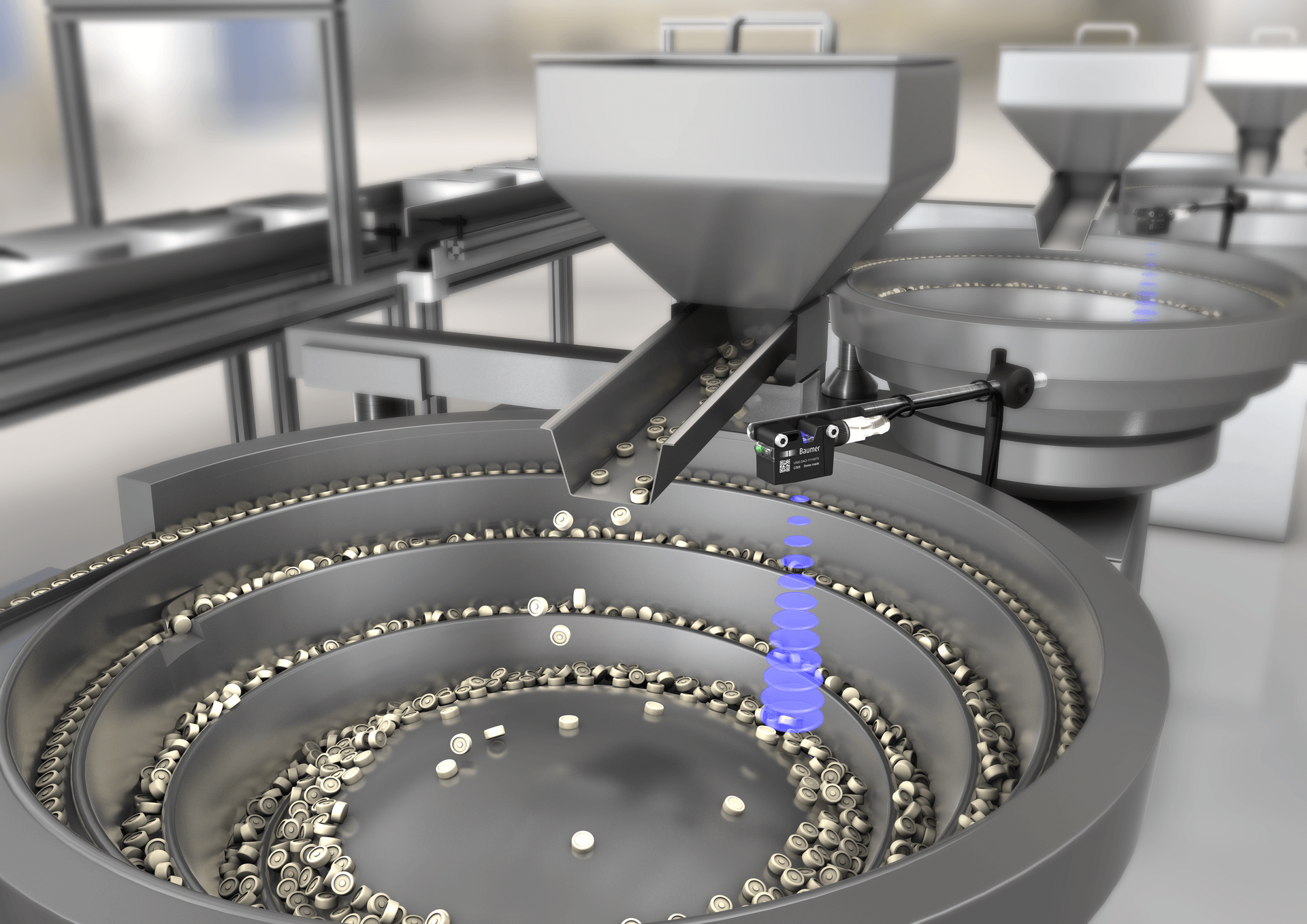
Ultrasonic sensors are the allrounders in the world of sensors and are suitable for virtually any detection tasks in industrial applications. The objects to be detected can be solid, liquid, granular or in powder form. They reliably detect transparent or high gloss objects as well as objects of changing color. Being extremely tolerant to dirt, the efficiency of ultrasonic sensors comes into its own especially in harsh working environments, as process reliability is not adversely affected by dust, smoke, mist or similar.
Thanks to their application versatility, ultrasonic sensors are used in most varied industries, such as packaging, electronics and feeder technology. Here you find more application examples of ultrasonic sensors and specific application benefits in specific applications.
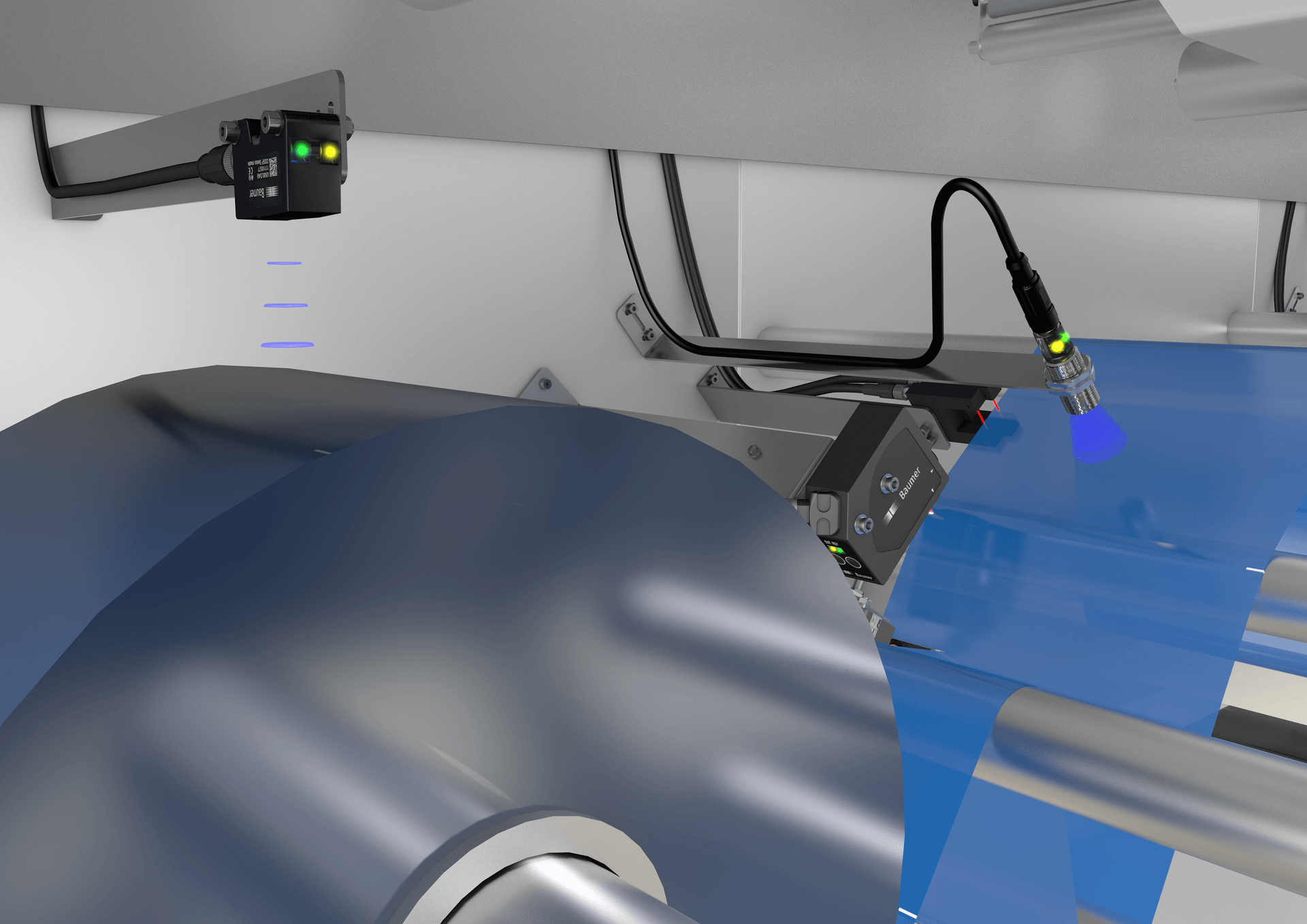
Typical applications of ultrasonic sensors
Reliable detection of various carrier materials, no matter which color, whether glossy or transparent.
Reliable object detection on varied surface structures.
Point level detection of materials with different geometries as well as level detection.