Principe de fonctionnement
Les capteurs d’images transforment des photons en charge électrique par effet photoélectrique. À la différence des capteurs CCD (Charge-Coupled Device), les capteurs CMOS (Complementary Metal-Oxide Semiconductor) transforment les charges déjà sur le pixel, en tension. Celle-ci est amplifiée, quantifiée et transmise sous forme numérique.
Les capteurs CMOS actuels séduisent par leur cadence d’images élevée et leur excellente qualité d’image. Ils permettent aux caméras industrielles performantes de réaliser une analyse précise des images. En raison du progrès technologique, ils ont remplacé les capteurs CCD dans la plupart des applications.
La présentation suivante donne un aperçu du principe fondamental de fonctionnement et des caractéristiques essentielles des capteurs CMOS.

1) Pleine capacité [e–] et capacité de saturation [e–]
Imaginez qu’un pixel est un « seau » et que la pleine capacité est le nombre maximal d’électrons qui peuvent être accumulés dans ce « seau ». La capacité de saturation réellement utilisée pour la caractérisation d’une caméra est directement mesurée dans l’image de la caméra. La valeur est en général inférieure à la pleine capacité, afin d’éviter les non-linéarités. Une capacité de saturation élevée permet des temps d’exposition plus longs. Un pixel surexposé est fixé à la valeur numérique DN maximale et ne contient donc aucune information utile.
2) Seuil de sensibilité absolu [e–]
Le seuil de sensibilité absolu (AST, Absolute Sensitivity Threshold) décrit le nombre minimal de photons (rayonnement minimal détectable) pour lequel la caméra peut différencier les informations utiles dans l’image des bruits. Cela signifie que plus le seuil est faible, plus la caméra est sensible. Le seuil de sensibilité absolu comprend l’efficacité quantique, le bruit d’obscurité ainsi que le bruit photonique et il faut le prendre en compte quand une faible lumière est utilisée, plutôt que de seulement considérer le rendement quantique.
Le seuil de sensibilité absolu correspond à la valeur du seuil pour laquelle SNR vaut 1 (signal équivalent au bruit).
3) Bruit d’obscurité temporel [e–]
Chaque pixel produit un signal (d’obscurité) même si le capteur n’est pas éclairé. Des électrons sont même générés sans lumière dans chaque pixel si le temps de pose et la température augmentent. La variation du signal d’obscurité est décrite comme le bruit d’obscurité (mesuré en électrons). Un bruit d’obscurité peu élevé est avantageux pour la plupart des applications. Le bruit d’obscurité avec le bruit photonique et le bruit de quantification décrivent le bruit d’une caméra.
4) Dynamique [dB]
La dynamique est le rapport entre le nombre maximal et minimal d’électrons mesurables de la capacité de saturation. Les caméras de dynamique élevée peuvent fournir simultanément des informations détaillées sur les zones sombres et claires d’une même image. C’est pourquoi une dynamique élevée est surtout importante lorsque l’image comporte des zones sombres et claires ou que les conditions d’éclairage changent rapidement.
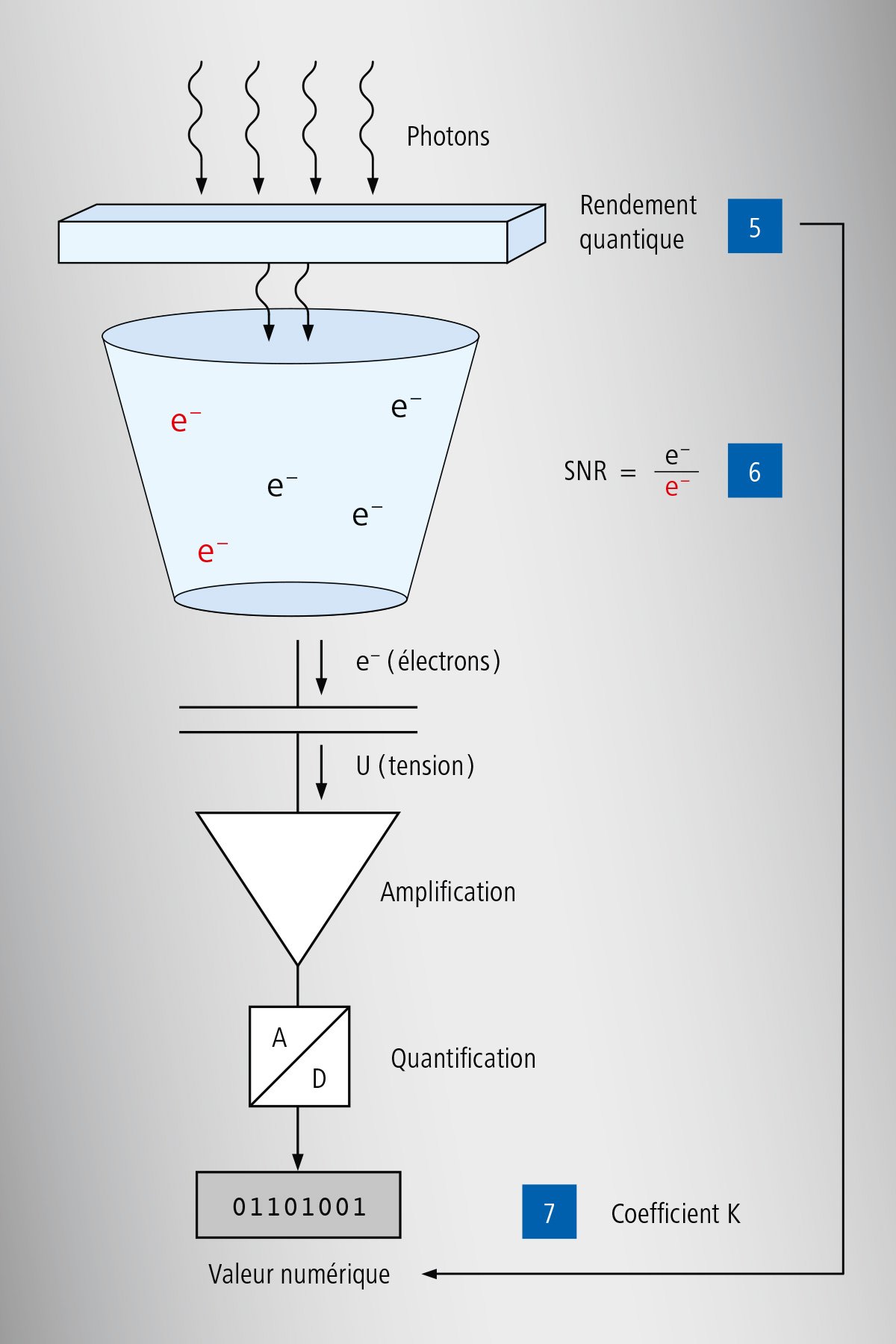
5) Rendement quantique [%]
Un capteur d’image transforme des photons en électrons. Le taux de conversion, le rendement quantique (QE), dépend de la longueur d’onde. Plus le nombre de photons transformés en électrons est élevé, plus un capteur est photosensible et plus la quantité d’informations émises de l’image est élevée. Les valeurs mesurées d’une caméra peuvent différer des données du fabricant du capteur p. ex. en cas de l’utilisation d’un verre de protection ou d’un filtre.
5) Rapport signal-bruit maximal (SNRmax) [dB]
Le rapport signal-bruit (SNR) est le rapport entre la valeur de gris (corrigée des bruits d’obscurité) et le bruit du signal. Il est souvent exprimé en dB. Le SNR dépend principalement du coefficient K et du bruit d’obscurité et augmente avec le nombre de photons. Le SNR maximal (SNRmax) est atteint quand le pixel a accumulé le nombre maximal d’électrons de la capacité de saturation possible.
7) Coefficient K (Valeur numérique DN/e–)
Une caméra transforme les électrons (e–) du capteur d’image en valeur numérique (DN). Cette conversion est indiquée par l’amplification générale K du système, exprimée en valeur numérique (DN) par élection (e–) : K électrons sont requis pour augmenter la valeur de gris de un DN. Le coefficient K dépend de la conception thermique et de l’électronique de la caméra. Un meilleur coefficient K peut améliorer la linéarité aux dépens de la capacité de saturation.
Comparaison des performances
Avec la norme EMVA 1288, l’EMVA (European Machine Vision Association) définit des méthodes de mesure et de caractérisation uniformes et objectives pour les capteurs d’image et les caméras dans le traitement industriel de l’image, et encourage ainsi la comparabilité entre les distributeurs de caméras.