C
Czas tarowania
Jest to maksymalny czas, jaki czujnik potrzebuje do wykonania tarowania.
Częstotliwość graniczna
Przy tej częstotliwości sygnał wyjściowy jest tłumiony o 3dB (do około 70,7%).
Częstotliwość pomiaru
Częstotliwość pomiaru opisuje wewnętrzną częstotliwość próbkowania sygnału czujnika analogowego.
D
Dodatnia biegunowość sygnału
Dodatnia zmiana sygnału wyjściowego przy określonym kierunku zmiennej wejściowej.
E
EMC
Wytyczna / norma dotycząca odporności, emisji elektromagnetycznych i napromieniowania.
G
Graniczna siła poprzeczna
Dopuszczalna statyczna siła poprzeczna, która przy jednoczesnym obciążeniu siłą nominalną nie powoduje trwałych, istotnych zmian właściwości metrologicznych czujnika siły.
Graniczny moment obrotowy
Dopuszczalny moment obrotowy wokół osi pomiarowej czujnika siły, który nie powoduje trwałych istotnych zmian właściwości metrologicznych czujnika siły przy jednoczesnym obciążeniu go siłą nominalną.
Graniczny moment zginający
Dopuszczalny statyczny moment zginający, który nie powoduje trwałych istotnych zmian właściwości metrologicznych czujnika siły przy jednoczesnym obciążeniu siłą nominalną.
H
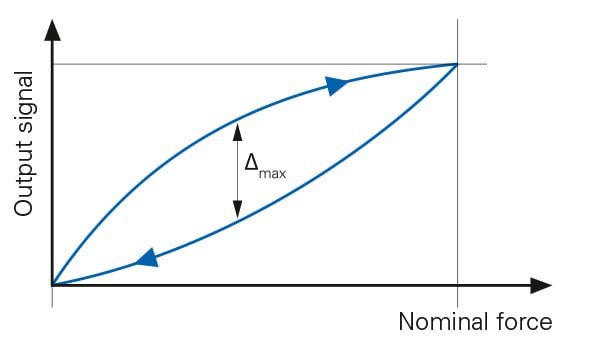
Histereza
Histereza, zwana również w literaturze rozpiętością odwracania, jest różnicą pomiędzy sygnałami wyjściowymi serii w górę i w dół przy tym samym obciążeniu w każdym przypadku, w odniesieniu do sygnału wyjściowego przy rosnącym obciążeniu w idealnych warunkach instalacji. Czynnikami wpływającymi na to są histereza materiałowa korpusu czujnika, histereza w zasadzie pomiaru oraz zewnętrzne wpływy tarcia związane z konfiguracją pomiaru.
I
Impuls tarowania
Impuls tarowania to minimalny czas, w którym musi zostać przekroczony poziom (U_{Ta}), aby rozpoczęło się tarowanie.
M
Minimalna siła rozrywająca
Minimalna siła rozrywająca opisuje siłę czujnika siły, powyżej której należy spodziewać się zniszczenia mechanicznego. Jeśli obciążenie przekroczy minimalną siłę rozrywającą, dalsze stosowanie czujnika nie jest zalecane.
Mostki rezystancja wejściowa
Rezystancja omowa pomiędzy zaciskami zasilania +VS i -VS pasywnego czujnika pomiarowego.
Mostki rezystancja wyjściowa
Rezystancja omowa pomiędzy wyjściami sygnałowymi Sig+ i Sig- pasywnego czujnika pomiarowego.
N
Napięcie mostka
Stabilizowane napięcie zasilania dla pasywnego czujnika pomiarowego.
Nominalna droga pomiarowa
Nominalna droga pomiarowa opisuje drogę, jaką dwa zewnętrzne punkty przyłożenia siły lub powierzchnie czujnika siły pokonują w kierunku pomiarowym względem siebie w wyniku obciążenia siłą nominalną. Typowa nominalna droga pomiarowa membranowego czujnika siły wynosi ok. 0,1 mm.
Nominalna wartość charakterystyczna \(U_{E}})
Ratiometryczny sygnał wyjściowy czujnika pasywnego przy sile nominalnej. Sygnał wyjściowy jest proporcjonalny do napięcia mostka \(U_{E}) .
O
Obciążenie wtórne
Maksymalna rezystancja obciążenia wyjścia prądowego. Obciążeniem wtórnym jest rezystor pomiarowy (rezystancja wejściowa analogowej karty pomiarowej), który przemienia prąd sygnału na mierzalne napięcie.
Ochrona przed korozją
Ochrona antykorozyjna opisuje, według jakiej kategorii korozyjności wg DIN EN ISO 12944-2 czujnik może być bez problemu stosowany w określonych warunkach otoczenia.
Odchylenie punktu zerowego
Odchylenie punktu zerowego opisuje maksymalne odchylenie sygnału zerowego w stanie wymontowanym od wartości zerowej odniesionej do nominalnej wartości charakterystycznej. W przypadku czujników siły poniżej 100 N należy upewnić się, że czujnik spoczywa bez udziału siły na płaskiej powierzchni.
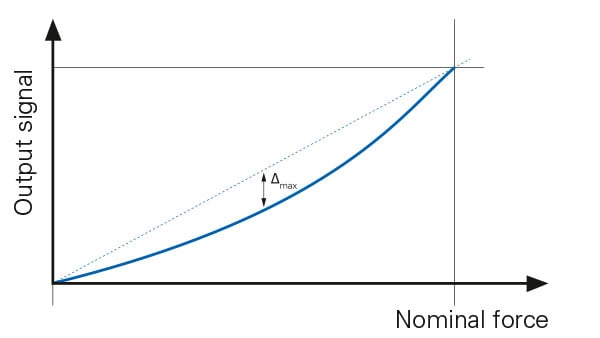
Odchyłka liniowości
Odchylenie liniowości to maksymalne odchylenie charakterystyki czujnika wyznaczane przy wzrastającej sile od linii odniesienia przechodzącej przez punkt zerowy w idealnych warunkach instalacji. Prosta odniesienia jest funkcją kompensacyjną pierwszego stopnia, której nachylenie wyznacza się tak, aby suma kwadratów wszystkich odchyleń sygnału od prostej odniesienia dawała minimum (w literaturze: metoda najmniejszych kwadratów błędu). Główną przyczyną odchylenia liniowości jest często niesymetryczne przyłożenie siły.
Odkształcenie nominalne
Odkształcenie nominalne to odkształcenie, dla którego czujnik jest nominalnie zaprojektowany, tzn. do którego zachowane są specyfikacje metrologiczne. W poniższych informacjach wartość procentowa odnosi się zawsze do odkształcenia nominalnego.
Odtwarzalność
Odtwarzalność opisuje dokładność czujnika przy zmianie pozycji montażowej. Maksymalna różnica sygnałów wyjściowych przy tej samej sile jest określana na podstawie kilku serii pomiarów w różnych pozycjach montażowych. Odtwarzalność jest szczególnie ważna w przypadku czujników siły, które wykonują pomiary tymczasowo i są często instalowane i usuwane.
Opór izolacji
Rezystancja omowa mierzona pomiędzy dowolnym przewodem łączącym a korpusem czujnika pod określonym napięciem testowym.
P
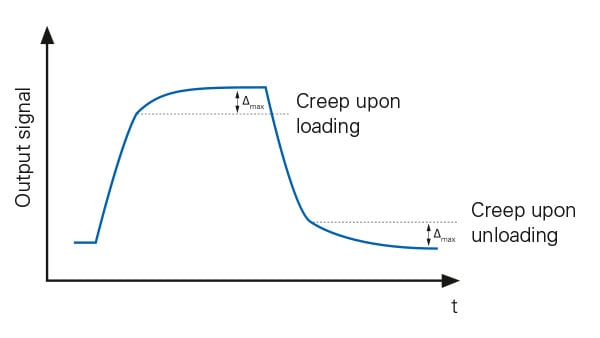
Pełzanie
Pełzanie opisuje zależną od czasu zmianę sygnału wyjściowego czujnika siły przy stałym obciążeniu. Rozróżnia się pełzanie obciążeniowe i pełzanie odciążeniowe. W przypadku pełzania obciążeniowego badana jest zmiana sygnału pomiarowego przy stałej sile w dłuższym okresie. W przypadku pełzania odciążeniowego czujnik siły jest obciążany przedtem stałą siłą nominalną. Po odciążeniu ocenia się następnie zmianę sygnału pomiarowego w stanie odciążonym.
Pobór prądu
Maksymalny pobór prądu w warunkach nominalnych, prąd rozruchowy przez kilka ms może być większy.
Podstawowa częstotliwość rezonansowa
Częstotliwość rezonansowa, przy której nieobciążony czujnik siły bez części wprowadzających siłę oscyluje w kierunku osi pomiarowej po wzbudzeniu uderzeniowym, przy czym jego podstawa przeznaczona do zamocowania jest połączona z odpowiednią masą.
Powtarzalność
Powtarzalność opisuje dokładność czujnika przy niezmienionej pozycji montażowej. Maksymalna różnica sygnałów wyjściowych przy tej samej sile jest określana na podstawie kilku serii pomiarowych przy niezmienionej pozycji montażowej. Powtarzalność jest szczególnie ważna w przypadku czujników siły, które są instalowane jednorazowo.
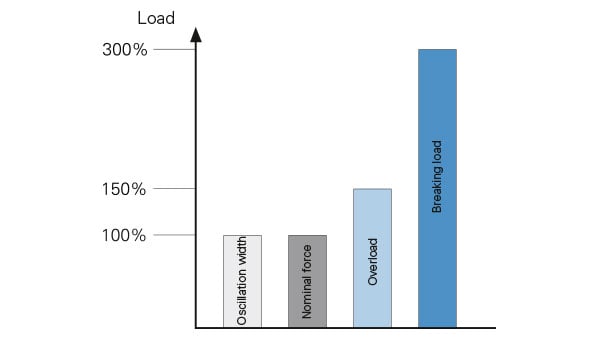
Przeciążenie
Przeciążenie to siła, poniżej której czujnik siły zachowuje pełną zdolność działania i nadal utrzymuje specyfikacje techniczne przy jednokrotnym obciążeniu. Czujnik nie ulega żadnym odkształceniom plastycznym.
R
Rezystancja mostka
Rezystancja omowa całego mostka pomiarowego.
Rezystancja obciążenia
Minimalna rezystancja wejściowa podłączonego systemu pomiarowego.
Rodzielczość pomiaru
Najmniejszy możliwy podział przenoszonych wartości pomiarowych w systemach cyfrowych.
S
Siła nominalna
Siła nominalna jest siłą, dla której czujnik jest nominalnie zaprojektowany, tzn. do której zachowane są specyfikacje metrologiczne. W zależności od rodzaju rozróżnia się nominalną siłę rozciągającą i ściskającą. W poniższych informacjach wartość procentowa odnosi się zawsze do siły nominalnej.
Stopień ochrony DIN EN 60529
Stopień ochrony wskazuje, w jakim stopniu czujnik jest zabezpieczony przed wilgocią i pyłem oraz przed wnikaniem ciał obcych.
Sygnał wyjściowy
Typ sygnału wyjściowego czujnika ze wzmacniaczem elektrycznym. Sygnał wyjściowy jest proporcjonalny do siły nominalnej. Dla czujnika siły 100 N z wyjściem napięciowym 0 10 V, 0 V odpowiada sile 0 N, a 10 V sile nominalnej 100 N.
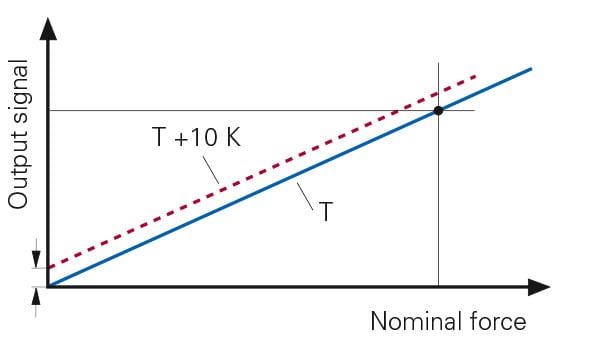
Sygnał zerowy TK
(TK_{0}) opisuje zmianę sygnału zerowego czujnika siły w stosunku do nominalnej wartości charakterystycznej na skutek zmiany temperatury otoczenia (T_{i}) o 10 K. Specyfikacja jest podawana w % na 10 K.
Sztywność czujnika
Sztywność czujnika jest definiowana jako stosunek siły do odkształcenia osiowego korpusu czujnika. Wykorzystując sztywność czujnika, można w decydujący sposób wpływać na podstawową częstotliwość rezonansową czujnika.
Szum
Wartość rzeczywista szumu sygnału wyjściowego w określonym zakresie częstotliwości.
T
Tarowanie aktywne
Napięcie to musi być przynajmniej przyłożone do wejścia tary, aby można było bezpiecznie rozpocząć tarowanie.
Tarowanie nieaktywne
Napięcie to nie może być przekroczone na wejściu tarowania, aby na pewno zostało uruchomione tarowanie.
Tolerancja wartości charakterystyki/czułości
Względne odchylenie wartości charakterystyki przy obciążeniu nominalnym od nominalnej wartości charakterystyki.
W
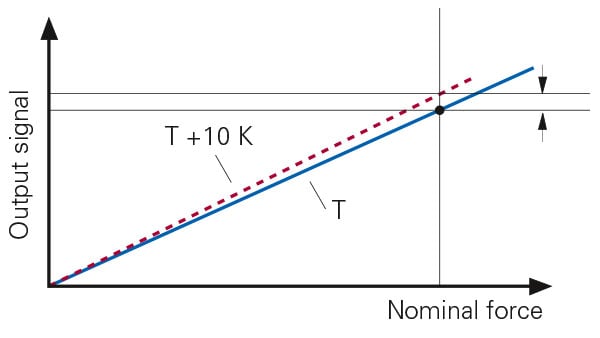
Wartość charakterystyczna TK
(TK_{E}) opisuje względną zmianę wartości charakterystycznej czujnika siły w wyniku zmiany temperatury otoczenia (T_{i}) o 10 K. Specyfikacja podawana jest w % na każde 10 K.
Wibracje DIN EN 60068-2-6
Odporność czujnika na narzucone sinusoidalne ruchy oscylacyjne o określonym z góry stopniu ostrości, bez trwałych istotnych zmian jego właściwości metrologicznych, dopóki nie zostanie przekroczona siła nominalna.
Wibracje przypadkowe DIN EN 60068-2-64
Odporność czujnika na wibracje bez trwałych istotnych zmian właściwości metrologicznych do wartości siły nominalnej.
Wstrząsy DIN EN 60068-2-27
Odporność czujnika na obciążenia udarowe (wstrząsy mechaniczne) bez trwałych istotnych zmian właściwości metrologicznych czujnika, bez przekraczania wartości siły nominalnej.
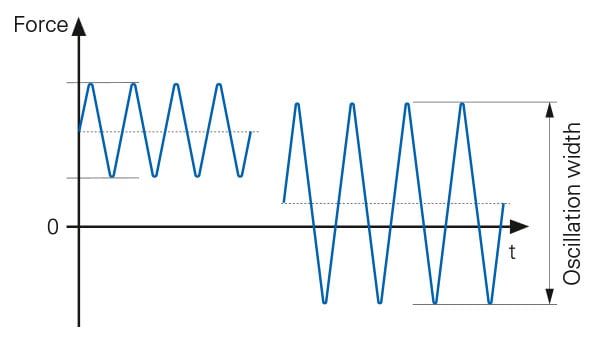
Wytrzymałość zmęczeniowa
Granica obciążenia odnosząca się do siły nominalnej, poniżej której czujnik może przetrzymać co najmniej ponad 1 milion cykli obciążenia dynamicznego bez trwałych zmian właściwości pomiarowych. Często spotykana w literaturze także pod określeniem względnego zakresu obciążeń.
Z
Zakres napięcia roboczego
W tym zakresie napięć czujnik może pracować w trybie ciągłym w całym zakresie temperatur roboczych bez przekraczania granic właściwości metrologicznych i bez narażania elektrycznego obwodu ochronnego.
Zakres tarowania
W tym zakresie czujnik jest w stanie wykonać tarowanie i wyregulować sygnał wyjściowy na sygnał zerowy.
Zakres temperatury roboczej
Zakres temperatury roboczej opisuje zakres temperatur, w którym czujnik zachowuje swoje właściwości metrologiczne.
Zakres temperatury składowania
Zakres temperatury, w którym czujnik może być składowany w stanie mechanicznie i elektrycznie nieobciążonym bez trwałej, znaczącej zmiany jego właściwości metrologicznych, możliwej do wykrycia przy ponownym użyciu czujnika w zakresie temperatury roboczej.