Schweiz
ch
Deutsch

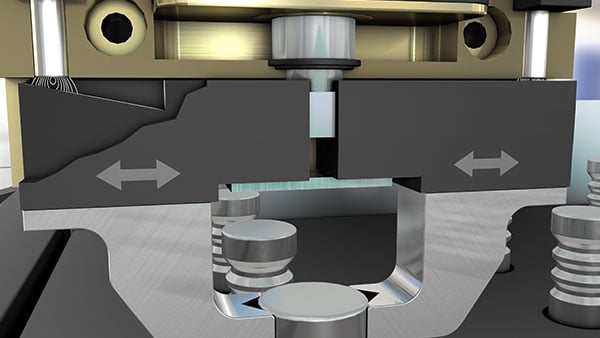
Aufgabe: Messen der Greiferfingerposition, um Information über das gegriffene Bauteil zu erhalten sowie zu Positionierungszwecken. Eine Nocke bzw. ein Keil, welcher am beweglichen Teil befestigt ist dient als Target zur Abstandbestimmung durch einen messenden, induktiven Miniatursensor.